
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [ 3 ] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] поворота объекта отнсительно той же системы координат - курс К, дифферент и крен 6. Пусть требуется сохранять неизменным направление на визируемую точку при перемещениях подвижного объекта. Возьмем единичный вектор, направленный в точку визирования, и спроектируем его на оси горизонтной системы Зенит Ттиаизиробанш 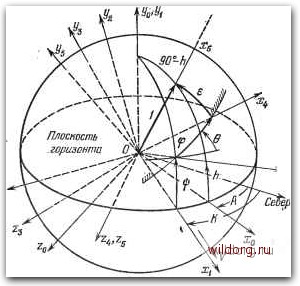 Рис. 1.4. К задаче стабилизащш визирующего устройства на подвижном объекте. координат Oxij/iZi. Затем повернем эту систему координат последовательно на углы диф(юрента ij), крена 6, углы поворота оси визирующего устройства ф и е. В результате этих поворотов система координат Оху будет так расположена, что ось ОХй совпадает с единичным вектором, а оси Ог/5 и Ozb будут ему перпендикулярны. При этом проекция единичного вектора на ось Ох будет равна единице, а на две другие оси - нулю. Условия г/5 = О и = О служат признаком того, что углы поворота ф и е реализованы правильно и визирующее устройство направлено в заданную точку небесной сферы. Формулы преобразования координат в соответствии с некоторым поворотом системы координат Oxyz относительно оси Oz на угол а (рис. 1.Б) имеют вид ж" = д; cos а + у sin а, у = у cos ( >a + sina, » > а - л; sin а. J (1.1) 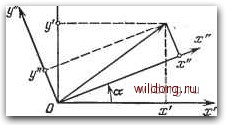 Рис. 1.Б. Задача преобразования координат. Пересчет координат по формулам (1.1) делается так называемым преобразователем координат, в качестве которого может использоваться ЦВМ. Для реализации последовательных поворо-тов на углы ft, К - А, - У ф, 6, ф и е требуется шесть преобразователей координат. Схема такого вычислительного устройства, реализуемого на ЦВМ, изображена на рис. 1.6. Углы, на которые последовательно осуществляется поворот исходного единичного вектора, должны вводиться в ЦВМ от соответствующих кодирующих датчиков углов, соединенных с осями гироскопического стабилизатора, вырабатывающего углы (К - ). ф и 6, и с осями приводов наведения по углам ф и е. Выходные сигналы г/5 = Ае и 26 = Аф подаются на входы приводов наведения. Нетрудно видеть, что с точки зрения динамики системы управления ЦВМ выполняет функции сравнивающего устройства, определяющего разности Аф и Ае. Однако эти разности определяются в результате проведения значительного объема вычислений. Следует заметить, что, вообще говоря, углы Л и ft являются функциями времени. Поэтому в действительности для визирования определенной точки небесной сферы требуется задать координаты этой точки в системе координат, связанной с небесной сферой, например склонение и часовой угол, а затем преобразовать эти координаты в географическую систему координат, что требует реализации в ЦВМ еще двух дополнитель.ных.ишш!казй]Ши координат. Вторая, наиболее часто возлагаемая на ЦВМ задача, заключается в обеспечении желаемых динамических характеристик системы управления посредством использования корректирующих программ в ЦВМ. В этом случае ЦВМ представляет собой по существу цифровой фильтр с заданньши характери- =sin Л стиками. В качестве примера рассмотрим систему стабилизации космического корабля «Апполон»[ 121]. В случае совместного полета корабля вместе с лунным отсеком возможны два режима. Первый режим соответствует номинальным условиям заполнения топливных баков и носит название широкополосного режима. Частотные характеристики разомкнутой системы управления для этого режима изображены на рис. 1.7, а. Кривая I соответствует случаю учета контура компенсации эксцентриситета вектора тяги, а кривые 2 - контурам наведения и компенсации эксцентриситета вектора тяги. Основная частота среза равна 1,25 рад/с. Корректирующий фильтр вносит стабилизацию на частотах упругих тонов, меньших 8,4 рад/с, за счет фазового запаздывания. При этом запас устойчивости по фазе на резонансной частоте составляет 35°. В широкополосном режиме обеспечивается стабилизация на любых жидкостных тонах, присущих кораблю с лунным отсеком в случае полного или почти полного заполнения взлетных и посадочных баков лунной кабины. Однако при частичном заполнении топливных баков лунной кабины н почти цолном опорожнении топливных 5 = Рис. 1.6. Структура преобразователя координат. [0] [1] [2] [ 3 ] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0131 |