
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [ 100 ] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] Входной сигнал u{t) представляет многомерный случайный процесс типа белого шума с математическим ожиданием всех компонент, равным нулю. В начальный момент времени t = to матрица-столбец x(to) характеризует начальное состояние системы и соответствует многомерной случайной величине с нормальным распределением. Это означает, что величины x(t) и go (О соответствуют многомерным нормальным процессам. Матричная структурная схема, соответствующая уравнениям (4.124), изображена на рис. 4.13. Эта схема u(t) 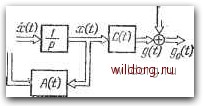 Рис. 4 ]3. Матричная структурная схема непрерывного формирующего ф1т.яьтра. В части, соответствующей первому уравнению (4.124), и является формирующим фильтром для входного процесса системы управления. Схема содержит п интеграторов. Звено А (t) показывает связи в системе. Эта матрица имеет вид «11(0 012 (t) ain(t) (4.125) А (t) = I "22 (О ... ап (О aniiO an2(i) ... Коэффициент Су (О есть коэффициент передачи по обратной связи с выхода /-го интегратора на вход i-ro интегратора. Подобным же образом могут быть записаны матрицы В и С. В соответствии с теорией линейных дифференциальных уравнений все их решения могут быть выражены через фундаментальную матрицу Ф(/, to), являющуюся Переходной матрицей для системы уравнений. Эта матрица оказывается невырожденной, и она удовлетворяет дифференциальному уравнению £51. = Л(/)ф,/, /о) (4.126) С начальными условиями Ф (О) о) = Л где / -единичная матрица размером пхп. В стационарных системах л (О = const и ф(/, о) = = Ф(то), где XQ=t - to. Тогда уравнение (4.126) легко решается переходом к изображениям Лапласа рФЛр)-/==лфлр), откуда изображение фундаментальной матрицы Далее можно перейти к оригиналу ф(То) = <5?-М[р/-л]-П. Для рассмотренного выше примера 4.3 матрицы коэффициентов имели вид
Обратная матрица [р/-Л]-1: Ьр + ар+\ Переход к оригиналам дает здесь Ф{Хо)е-.-°Х cos Рто + -р- sin Рто -р sin рто - Р (1 + sin К cos Рто-sin Рто I где }х = 0,5с/Ь, а Р = 1/Ь" -Этот результат совпадает с тем, что было получено в примере 4.3. В соответствии с (4.124) можно записать уравнение движения свободной системы-аналога: =Л(<)(0. Тогда решение для x{t) х(/) = Ф(/, Qx{to). (4.127) (4.128) Таким образом, матрица Ф(/, о) соответствует линейному преобразованию, которое отображает состояние g 4.Б] ОСНОВЫ таОРИИ ФИЛЬТРОВ КАЛМАНА 309 системы x(to) в состояние x{t). Поэтому она носит название переходной матрицы. Для переходной матрицы имеет место следующая зависимость: Ф(2, /«) = Ф(4, /1)Ф(/1. /о). (4.129) из которой вытекает равенство Ф 41. о) = Ф(/о. /i). (4.130) Для первого уравнения (4.124) можно записать решение через переходную матрицу: л;(0 = Ф( to)xito) + \0(t, х) В (х) и (X) dx. (4.131) Однако подобная запись решения имеет скорее методическое, чем практическое значение ввиду больших трудностей, связанных с использованием формулы (4.131). Входной сигнал системы-аналога представляет собой многомерный случайный гауссов процесс с нулевым математическим ожиданием и корреляционной (ковариационной) матрицей cov[«(0; u{t + x)] = M[u(t)u(t + x)] = Q(t)8(x). (4.132) Здесь Q (t) - симметричная положительно-определенная матрица размером гхг, а б (т) - единичная дельта-функция. Начальное состояние системы-аналога характеризуется матрицей-столбцом x(t(,), который определяет многомерную случайную величину с гауссовым распределением, имеющую заданное математическое ожидание М[х(4)]=А-о и корреляционную матрицу P(/o) = cov[x(g, xito)] = M{[xito)-Xo][x{to)-Xo]}. (4.133) Здесь Р (/о) -симметричная матрица размером пхп. Она может быть, в частности, диагональной, элементы которой суть дисперсии компонент матрицы-столбца переменных состояния. Измерительное устройство, которое используется для получения информации о наблюдаемых величинах системы-аналога, т. е. компонентах матрицы-столбца C{t)x{t), содержит всегда источник помех (ошибок измерения). Поэтому наблюдаемый сигнал записывается в виде gAt)C{t)x{t) + v{t), (4.134) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [ 100 ] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0134 |