
|
|
|
Главная страница Структура цифровых систем [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] ЗУ1, ЗУ/,, представляющих собой, по существу, запоминающие устройства, управляемые коммутирующим устройством /Сг- Сигналы от запоминающих устройств ± Лрид1МЕПшческое устройство (npaneccojj) Управляющее устройстбо Иоманды Манные Оперативное запоминающвв устройстбо Иоманды /правление Долговременное запоминающее устройство Индзормация Устройства Ввода и ВыВода Рис. 1.1. Возможная структура цифровой вычислительной машины 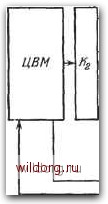 Объект (одьБмтьГ) упраЬлений Рис. 1.2. Общая структурная схема системы управления с ЦВМ. поступают на исполнительные устройства ИУ, ИУь, воздействующие на объект (или объекты) управления. Собственно ЦВМ включает в себя процессор совместно с устройствами памяти и устройством управления. g 1.1] СТРУКТУРА ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ Такая система может быть связанной многомерной, если осуществляется управление сложным многомерным объектом, и несвязанной многомерной, если осуществляется управление группой несвязанных одномерных объектов. В последнем случае ЦАС распадается на совокупность одномерных систем. 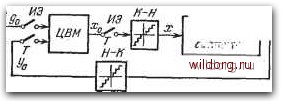 Непрерывная 1/асть системы Рис. 1.3. Одномерная система управления с ЦВМ. При управлении сложным объектом или группой объектов процессор обслуживает по очереди отдельные каналы управления. Эта очередь может осуществляться по жесткой программе или по мере поступления заявок от отдельных каналов с возможностью использования в последнем случае приоритетного обслуживания. При жесткой программе обслуживания каналов период дискретности оказывается обычно постоянным, хотя он может быть разным в отдельных каналах. При обслуживании по гибкой программе период дискретности оказывается случайной величиной с некоторым математическим ожиданием и дисперсией. Таблица 1 1
Основной для исследования обычно является одномерная система. Структурная схема одномерной системы с ЦВМ изображена на рис. 1. 3 [8]. Она содержит входные преобразователи непрерывной величины в код Н-К. Кодироваться может входное задающее воздействие g{t), представляющее собой желаемое значение управляемой величины у (t), управляемая величина, а также другая, поступающая извне информация. В результате такого
кодирования на входЦВМ, а точнее, ее процессора поступают цифровые представления этих величин: go и уо. Дискретность ввода этих величин в процессор иллюстрируют импульсные элементы ИЭ, работающие с периодом дискретности Т. Выходная величина процессора Хо есть цифровое представление сигнала управления. Далее эта величина проходит через преобразователь кода в [0] [ 1 ] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0142 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||