
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [ 101 ] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] где V {t) соответствует многомерному случайному гауссову процессу с пулевым математическим ожиданием и корреляционной матрицей cov[v{t); v{t-\-%)] = U[v{t)v{t + x)] = R{t)b{T). (4.135) Здесь R (t) - симметричная положительно-определенная неособенная матрица размером тхт. Предполагается, что переменные и (t), v (i) и х (to) взаимно некоррелированы. Типовые формирующие фильтры будут рассмотрены более подробно ниже. Для дискретного случая модель процесса может быть описана разностным уравнением. В качестве переменных состояния могут приниматься значения некоторой решетчатой функции x\k], т. е. дискреты, для п моментов времени. Эти дискреты будут компонентами матрицы-столбца переменных состояния. В рассматриваемом случае матрицу-столбец можно отождествить с некоторым вектором. Линейная нестационарная дискретная модель процесса для входных воздействий может быть, по аналогии с (4.124), записана в виде матричного (векторного) уравнения: х[к+1]=Ф[к+1, k]x[k] + B[k]u[k], \ g[k]C[k]x[k]. j - Здесь X [й] - матрица-столбец (вектор), содержащая п компонент, н [] - матрица-столбец (вектор) сигналов на входе системы с г компонентами, -матрица-столбец (вектор) задающих воздействий, go [] - матрица-столбец (вектор) наблюдаемых величин, содержащая / компонент, ФГ/?+1, -матрица перехода состояний размером пхп, В [к] - матрица входных сигналов размером Ixn.B отличие от непрерывного случая здесь отсутствуют помехи измерения.- Матричная структурная схема модели процесса для дискретных входных величин в общем случае наличия помех измерения изображена на рис. 4.14. Вместо интеграторов (jinc. 4.2) зцесь использованы п линий задержки, а элементы [ц[к-\-1, k] квадратной матрицы + k] ... hnlk+l, k] fAk + U k] ... hnlk + h k] f,alk + l, k] ... fnAk + U k] (4.137) соответствуют коэффициентам передачи с выхода /-й линии задержки на период дискретности Т на вход i-й линии задержки. Входной сигнал u\k] представляет собой многомерную случайную гауссову решетчатую последовательность типа дискретного белого шума с нулевым математическим ожиданием и корреляционной матрицей cov{w[/2]; u{k-\-m]} = = IVI {ы [k] и [k + m]} = Q [/г] бо И. (4.13S) где Q [й] - симметричная положительно-определенная матрица размером гхг, а бо[т] - единичная импульсная функция. a[h] в[н] =>©=i> B-f" 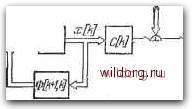 u[h] Рис. 4.14. Матричная структурная схема дискретного формирующего фильтра. -v[kl ] (4.139) В более поздних работах Р. Калмана рассматривается наличие помех измерения. В этом случае вместо (4.136) будем иметь х[к-{-\] = Ф[к\, Щх[Щ + В[к]иЩ, g,{k] = C[k]x\k] + v\k] = g{k] + x где ошибка измерения выходного сигнала v[k\ представляет собой многомерную случайную величину типа дискретного белого шума с нулевым математическим ожиданием и корреляционной матрицей COV {V[к]; v{k + m]} = U{v[к] v{к-f /и]} = Щбо[т], где R \И\ - симметричная положительно-определенная матрица размером 1x1. В отличие от сформулированной выше задачи, здесь предполагается отыскание оптимальной оценки в момент времени t = kT по результатам предыдущих измерений. включая И момент времени t = kT, но при наличии помех измерения. В начальный момент состояние системы характеризуется матрицей-столбцом (вектором) х [0] с гауссовым распределением и заданными математическим ожиданием и корреляционной матрицей (4.133). Как и ранее, здесь предполагается отсутствие корреляционной связи между л:[0], и\]г\ и ьЩ. Матрица Ф[--1, Щ является переходной для разностных уравнений (4.136) и (4.139). Она определяет переход из состояния, соответствующего времени кТ, в состояние, соответствующее времени (+1) Т. Поэтому Ф \к, k\ превращается в единичную матрицу Е размером пхп. Уравнения (4.136) могут быть записаны также в другой форме, если ввести матрицу Ф\к, к-\], определяющую переход системы из состояния в момент времени {к-\)Т в состояние, соответствующее времени Т. Тогда вместо (4.139) будем иметь х\ Щ = Ф{к, к-\\х[к-\] + Вг[к]иг[к], \ go [к] = СЩх Щ + v\k\ = g\k-\-\-v\kl ] (4-140) где BiЩUi{k\ = B\k-\]u\k-\]. Следует заметить, что дискретная модель процесса (рис. 4.14) соответствует непрерывной динамической системе, в которой все переменные рассматриваются только в дискретные моменты времени t=kT {к = 0, ±1, ±2, ...). Поэтому переходная матрица может быть определена из дифференциального уравнения непрерывной системы = A{t)Ф{t), hit<:h, при начальном условии Ф (/) = Ф [к, к] = Е для t = (к -1)7 и при Ф(0 = Ф[/е, к-1] для t = kT. Задачей калмановской оптимальной фильтрации является нахождение наилучшей оценки x{t) переменных состояния системы-аналога, описываемой уравнениями (4.124), на основании измерения наблюдаемого сигнала g{t) на интервале (о. О- Динамическая система, определяющая оценку x{t), называется фильтром. Выходным сигналом фильтра и будет оценка [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [ 101 ] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.015 |