
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [ 4 ] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] баков основного блока в системе управления появляются медленно расходящиеся колебания. В этом случае используется второй, так называемый узкополосный режим. Частотная характеристика разомкнутой системы для этого режима показана на рис. 1.7, б. Кривая / соответствует наличию 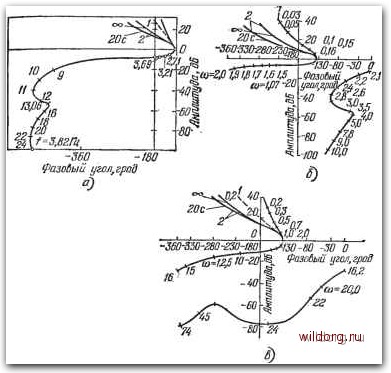 Рис 1.7. Амплитудно-фазовые частотные характеристики системы стабилизации. контура компенсации эксцентриситета вектора тяги, а кривые 2 - дополнительному учету контура наведения. Стабилизация системы достигается узкополосным фильтром за счет амплитудного подавления. Жидкостные тона, частоты которых ниже 2,08 рад/с, стабилизируются за счет фазового запаздывания. Запас устойчивости по амплитуде составляет 6 дБ на частоте среза, равной 0,35 рад/с. Ослабление на частотах упругих тонов превышает 100 дБ. Наконец, при отсутствии лунной кабины корректирующий фильтр создает частотную характеристику, которая изображена на рис. 1.7, в. Кривая / соответствует наличию контура компенсации эксцентриситета вектора тяги, а кривые 2 - дополнительному наличию контура наведения. Запас устойчивости составляет по фазе 50°, а по амплитуде 10 дБ. На частотах упругих тонов, которые превышают 5,3 Гц, коэффициент усиления контура близок к О дБ. Структура и параметры трех цифровых фильтров, реализуемых в бортовой ЦВМ, показаны на рис. 1.8. Случаю
l-0.657Dz~-D,3mz
t~0.370z- f-0.5384z Рис. 1.8. Цифровые фильтры системы стабилизации космического корабля. широкополосного фильтра соответствует рис. 1.8, а, узкополосному фильтру - рис. 1.8, б и фильтру системы при отсутствии лунной кабины - рис. 1.8, в. Переход от одного фильтра к другому осуществляется подключением той или иной программы, хранящейся в памяти бортовой ЦВМ. Обнаружение и коррекция неисправностей. Обычно часть программного обеспечения в управляющей ЦВМ предназначается для обнаружения неисправностей в самой ЦВМ и последующего включения дублирующего устройства, если оно необходимо для данной системы управления. Наиболее частым видом неисправностей являются кратковременные отказы. Этот тип неисправности определяется тем, что в одном или нескольких разрядах информации, находящейся в процессоре либо в оперативном запоминающем устройстве, может произойти сбой. Последствиями этого могут быть ошибки в вычислениях, неверная запись в оперативное запоминающее устройство, ошибка в пересылке программ и др. Одна из возможных логических схем обнаружения ошибок передачи управляющих сигналов одного из каналов управления изображена на рис. 1.9. До окончания каждого цикла вычислений алгоритма управления индикатор неисправностей показывает «сбой». Если все вычисления данного цикла произведены в заданной последовательности, то индикатор будет находиться в положении «правильно». Затем вычисления прерываются для проверки состояния
{„Сбой ЛЗтоматшесте прерывание , Правильно" вьшислений 1 , Правильна Проверка индикатора неисправности кем" Возврат д наВетой точке Рис. 1.9. Логический контур поиска неисправностей. индикатора. Если результат проверки дает ответ «правильно», то подпрограмма прерывания заканчивается, а программа вычисления алгоритма управления данного канала возвращается к соответствующему моменту реального времени и вычисления продолжаются. Если же вычисления в алгоритме управления канала не закончены, а программа перешла к вычислениям по другим алгоритмам, например, для управления следующим канало.м, то подпрограмма прерывания вернет программу вычислений в необходимое положение. Если при этом индикатор неисправности будет находиться в положении «сбой», то программа вычислений будет возвращена к некоторой «надежной точке» (последней точке промежуточного расчета, начальной точке вычислений, опирающихся на константы, записанные в долговременном запоминающем устройстве, и др.). При введении «надежной точки» предполагается, что [0] [1] [2] [3] [ 4 ] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0148 |