
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [ 94 ] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] Введем отсчет времени от начала прогнозирования (текущее время t) в виде времени прогнозирования То. Для То = О примем начальные условия Xi = «о и = «о-Подстановка начальных условий в общие выражения для а и а дает значения произвольных постоянных Ci = ao и Ca==(fiao-f ао)Р"- В результате имеем а =- аоб-»" (cos Рто + sin Ptq + e~ sin Рто = = аоФи(То)4-аоФ12(то), а = - «ор (l + e-> sin рТо + aoe~ (cos рТо - - sin рТо) = «оФз! (То) + ИоФаг (То), где Фи, Ф12, Ф-л и Фг2 -элементы фундаментальной матрицы. Полученный результат можно записать в матричной форме: а(То) = СФ(То)х(0). Здесь Ф(то)-фундаментальная матрица 2x2, л:(0) = = II Xl (0) л;г(0) II -матрица-столбец начальных значений х{1) при то = 0, а С = 1, 0-матрица-строка коэ(5фициентов. Схема прогнозируемого устройства для фиксированного интервала времени То = const изображена на рис. 4.9. Текущие значения переменных состояния Xi (t) = а (t) и Ха (/) = a{t), соответствующие времени То = 0, поступают на безынерционные звенья с фиксированными коэффициентами передачи %и = фц(то) и /12 = Ф12 (То), а затем складываются, в результате чего получается упрежденное значение угла а (/+ То) = АцК (О + i2« (О • Для нахождения схемы прогнозирующего устройства, просматривающего поведение угла а на всем интервале прогнозирования, найдем преобразование Лапласа для 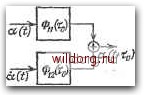 Рис. 4.9. Фильтр к примеру 4.3. с прогаозиро-вангюм на ггостоянное с начальными условиями а(0) = ао и а(0) = ао. Диф4)еренциальное уравнение (**) может решаться на любой вычислительной машине. Если ввести ускоренный Рпс. 4.10. Фильтр к примеру 4.3 с прогно-зировапием на интервал времени. темп решения, то машинное время t, = mt, где т>1. Тогда уравнение должно быть записано в виде + 2pm + {, + Р) а = 0. На рис. 4.10 показана структурная схема прогнозирующего фильтра, которая может быть реализована к;,к на цифровой, так и на аналоговой ЭВМ. Импульсные элементы ИЭх и ИЭ., замыкаются синхронно на короткое время для введения начальных условий «о и «о- Затем импульсные элементы размыкаются и устройство производит вычисление прогнозируемой величины а (тто) в ускоренном темпе. Процесс может периодически повторяться с необходимым интервалом дискретности. выражения (*): А (пЛ = + г ко (Р++ Р " (р + ц)Ч- Р= Последнее выражение можно представить в виде] (рз + + ,г + л (р) = ао (р + 2р) + «о. Ему соответствует дифференциальное уравнение = 1 - е-2Д g 4.4] ИСПОЛЬЙОВЛНИЕ ФИЛЬТРОВ ВИПЕРА 291 Характеристическое уравнение системы, изображенной на рис. 4.10: о Jo Для того чтобы оно совпало с моделируемым уравнением, необходимо выполнить условия То = 2ит и Найдем теперь ошибку прогноза в рассматриваемой системе. В соответствии с формулой (4.75) относительная дисперсия ошибки 00 со ri,in - 1 - i J [Я]: {x}f dx = 1 - У" J sin Рт dx = To T„ { - f J cos 2Pto + f sin 2Pt„) I - Таким образом, при то->0 дисперсия ошибки прогноза равна нулю, а при То->с» относительная дисперсия ошибки стремится к единице, т. е. к 100%. Заметим, что при то->с» прогнозируемое значение угла а стремится к нулю, т. е. к математическому ожиданию этой величины. § 4.4. Использование фильтров Шнера в цифровых слстемах При реализации фильтров Винера в цифровых системах возникает задача учета явлений квантования по времени и квантования по уровню. Остановимся вначале на квантовании по времени. Импульсный характер работы цифровых систем будет оказывать заметное влияние на работу системы и должен учитываться при расчете в тех случаях, когда период дискретности не может считаться малым. Понятие малости связано с видом полезного сигнала, который поступает на вход системы, а точнее -с его спектральной плотностью. В предыдущем параграфе было гюказано, что частотная передаточная функция разомкнутой системы, реализующей оптимальную частотную передаточную функцию Н (/со) при действии помехи Tinia белого шума, имеет полюсы, совпадающие с полюсами спектральной плотности полезного сигнала Sa (ю), лежащими в верхней полуплоскости. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [ 94 ] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0127 |