
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [ 117 ] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] В дискретных системах все оказывается аналогичным при выполнении условия ЩТ. Тогда и действительная частота входного воздействия со может быть заменена псевдочастотой 7 2 . щт (5.6) Ошибка системы в дискретные моменты времени t - nT не будет превышать заданного максимального значения 
Рис. 5.2. Контрольные точки для л. а. х. из условия точности. тах, если Л- 3. X. систсмы будст проходить не ниже контрольной точки с координатами L* (X,) = 20Igr* (А,) 1 = 20 Ig (5.7) где (уЯй)- частотная передаточная функция разомкнутой системы при значении псевдочастоты к = к. Построение показано на рис. 5.2, б. Заметим, что принятое условие co/-T- должно выполняться в цифровых системах всегда, так как иначе полезное воздействие не может быть воспроизведено достаточно точно. Ограниченные значения скорости и ускорения входного сигнала. Пусть на входе системы известны максимальное по модулю значение первой производной gmax (скорости) и максимальное по модулю значение второй производной тах (ускорения) ВХОДНОГО сигнзла g{t). при этом не накладывается никаких других ограничений на вид этого сигнала. Это может быть детерминированный или случайный сигнал с любой спектральной плотностью. Априорная информация об этом сигнале сведена к минимуму, и определяется величинами „ах и f„ах, которые в большинстве случаев могут быть легко оценены. Для заданных значений шах и gax подберем эквивалентный режим гармонического воздействия. Рассмотрим такой эквивалентный режим (О =9 max sin (Иэ + Яр,), (5.8) который характеризуется максимальным значением первой производной «эЯэ max = graax И максимальным значением 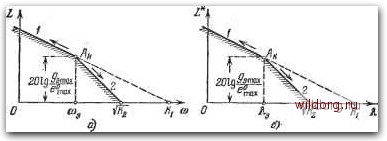 Рис. 5.3. Запретные области по условиям точности для астатических систем. второй производной a)S9raax = gmax. Для ЭТОГО режима можно определить частоту и амплитуду S max (5.9) (5.10) при произвольном значении начальной фазы ifg. В соответствии с формулами (5.9) и (5.10) на рис. 5.3, а построена контрольная точка Л.. Если по-прежнему сОд Т, то частоту можно заменить на псевдочастоту Кэ- По вычисленным значениям и этах при заданной величине максимальной ошибки бтлх можно ПОСТрОИТЬ ДЛЯ Л. а. X. L* (%) "60 синтез Нас при неизвестных; характеристиках [Гл. в контрольную точку Ak с координатами ХЕи} (5.11) L* (X,) = 20 Ig i W* (Аз) I = 20 Ig /"Г . (5.12) max S max Построение контрольной точки A,, показано на рис. 5.3, б. Рассмотрим теперь режим эквивалентного гармонического задающего воздействия, в котором амплитуда первой производной по-прежнему равна максимальному значению gmax, а амплитуда второй производной меньше максимального значения gmax- Тогда при уменьшении амплитуды второй производной в соответствии с (5.9) частота контрольной точки будет пропорционально уменьшаться, а амплитуда этах в соответствии с (5.10) будет пропорционально возрастать. При этом контрольная точка Л ft на рис. 5.3, а будет перемещаться в область более низких частот (влево) по прямой, имеющей отрицательный наклон 20 дБ/дек (единичный наклон). Если амплитуду второй производной устремить к нулю, то частота сОд 0. Это соответствует режиму работы системы управления с постоянной скоростью g = gmax. Заданное значение максимальной ошибки воспроизведения задающего воздействия связано в этом случае с gmax зависимостью Кг=, (5.13) гпах где К"! [с-] -Предельное значение общего коэффициента усиления (добротности по скорости) системы с астатизмом первого порядка, ниже которого в рассчитываемой системе нельзя иметь реальный общий коэффициент усиления разомкнутой системы при заданных значениях и gmax- Рассмотрим теперь эквивалентный гармонический входной режим с амплитудой второй производной входного воздействия, равной максимальному значению gmax, и амплитудой первой производной, меньшей заданного значения grnax- Аналогичными рассуждениями можно показать, что контрольная точка А (рис. 5.3, а) будет пере- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [ 117 ] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0151 |
||||||||||