
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [ 105 ] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] Два последних уравнения можно свести к одному, исключив при этом двойной аргумент в корреляционной матрице: Р[Щ = [1-{Ф[к, к-1]Р[к-1]Ф[к, k-l] + + B[k]Q[k]В[k])С[к]{С[к]{Ф[к, k-l]P[k~l]x Xф [ft, k-l] + B[k]Q[k]B [k]) С[k] + RX х{Ф[к, k-l]P[k-l](iy[k] + B[k]Q[k]B[k]). (4.171) Решение этого нелинейного разностного уравнения и определяет корреляционную матрицу Р[к]. В соответствии с уравнениями (4.168)-(4.171) на рис. 4.18 изображена структурная схема оптимального фильтра совместно с моделью процесса и блоком выработки коэффициентов усиления (весовых коэффициентов). Как и ранее, корреляционная матрица ошибок может быть определена на основании формулы, аналогичной (4.167): Ре [k/k] C[k]P [k/k] с [k]. (4.172) Эта матрица может быть использована для оценки ошибок отработки задающих воздействий. Как уже отмечалось выше, в реальных системах управления невозможно получить мгноьгнную реакцию в момент времени t = kT на входной сигнал, поступавший в тот же момент времени. Поэтому схема на рис. 4.18 является идеализированной. В реальных системах управления приходится отступать от этой схемы и использовать субоптимальные системы. В заключение отметим некоторые обобщения метода оптимальной фильтрации Калмана. В изложенных выше основах предполагалось, что помеха представляет собой белый шум. Возможна постановка вопроса оптимальной фильтрации и в тех случаях, когда эта помеха представляет собой «окрашенный» шум [106]. Требование того, чтобы дисперсии входных случайных процессов были заранее известны, может быть снято. В работе [119] принят метод, согласно которому законы распределения случайных процессов считаются нормальными, но с неизвестными дисперсиями. В результате предлагается оптимальный фильтр, который, наряду с оценкой переменных состояния процесса, позволяет дать оценку Р{И-1/Н-1] р[и/ичи[н]фмм PWM] ФМР[Ш-1МиМ*ШбШ1й Елок ВыраБотка --г,-И бесоЬьк коэфсрацаентой. Plk/ki] r=p[hjmmmpMmmf Модель процесса 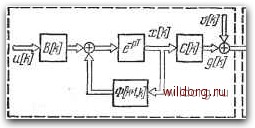 Оптимальный щильтр х[И/И] Рис, 4,18, Матричная схема оптимального фильтра при наличии помех измерения. § 4.6. Формирующие фильтры В одномерных задачах управления при задании непрерывного формирующего фильтра в соответствии с матричным уравнением (4.124) достаточно рассматривать одномерный белый шум (г=1). Если пока ограничиться случаем, когда матрица-столбец задающих воздействий сводится к единственной величине g (О, то дополнительно получим условие 1=1. Тогда помеха наблюдения также сводится к единственной величине v (t). Дифференциальное уравнение системы, моделирующей полезный сигнал g{t), представим в виде + а„-1 + ... + «о(0 = М(0. (4.172) Здесь «(/)-белый шум, а коэффициенты в левой и правой частях (4.172) в общем случае суть функции времени. Выберем в качестве переменных состояния задающее воздействие g{t) и его первые п-1 производных. также и неизвестным дисперсиям. Этот фильтр, по сути дела, оказывается расширенным фильтром Калмана. В статье [18] дается обзор методов решения задач построения дискретных фильтров Калмана-Бьюси при неизвестных корреляционных матрицах шумов. Для целей анализа эта проблема включает в себя проверку обоснованности модели, используемой в задаче фильтрации Калмана - Бьюси, путем исследования остаточных ошибок фильтрации и оценку ухудшения характеристик системы (анализ ошибок) при неточном моделировании системы. Для целей синтеза рассматривается проектирование оптимального фильтра, ограничивающего в допустимых пределах ошибки оценки, вызванные отсутствием информации о модели системы, и оценивающего одновременно корреляционные матрицы неизвестных шумов и состояние системы. Оценке влияния неточного знания априорной информации и возможностям адаптации посвящены работы [81, 86]. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [ 105 ] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0127 |