
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [ 129 ] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] колебательности необходимо выполнить условие (5.113) для постоянной времени Tg. Сумма всех постоянных времени, входящих в знаменатель (5.120), должна, в соответствии с (5.114) и (5.116), удовлетворять одному из неравенств: 1 = 3 (5-122) < = з Эти неравенства получаются из (5.114) и (5.116), если в районе максимального запаса по фазе использовать приближенную зависимость для фазового сдвига 2 arctg соТяа arctg coTs. 1 = 3 При обычно используемых значениях М= 1,1-г-1,7 это приближенное равенство выполняется с большой точностью. В л. а. X. подобного типа постоянное запаздывание т, если оно имеется в канале управления, легко учитывается добавлением его в левую часть неравенств (5.121) или (5.122). Системы с астатизмом первого порядка. Астатизм первого порядка часто встречается в системах, содержащих исполнительный двигатель электрического, пневматического или гидравлического типа. В простейшем случае, когда канал управления системы состоит из безынерционного усилителя и двигателя любого типа и не содержит корректирующих средств, передаточная функция разомкнутой системы может быть представлена в виде () = T(rfW (-12 где /Ci [с"1] - общий коэффициент усиления разомкнутой системы (добротность по скорости), а Ti - постоянная времени двигателя (электромеханическая, гидромеханическая и т. п.). Этой передаточной функции и соответствует асимптотическая л. а. х. типа 1-2, изображенная на рис. 5.16, а. В дальнейшем л. а. х. такого типа будем называть «несимметричными» в отличие от «симметричного» типового перехода оси нуля децибел, свойственного л. а. х., изображенной на рис. 5.14. Определение допустимого значения постоянной времени Ti с точки зрения необходимого запаса устойчивости может быть сделано путем нахождения показателя колебател ьности I Н (/(о) Imax = - o)fr, + /o) + /f, (5.124) -/ Исследуя (5.124) на максимум, можно найти условие того, чтобы показатель колебательности не превышал заданного значения: M+MVM-l (5.125)  Рис. 5.16. «Несимметричные» л. а. x. систем с астатизмом первого порядка (типа 1-2 и 1-2-3...). Формула (5.125) позволяет при заданном значении добротности по скорости определять допустимое значение постоянной времени двигателя или при заданном значении постоянной времени двигателя - максимальное значение добротности по скорости, которое можно иметь в системе. В более сложном случае, когда в канале управления имеется ряд инерционных звеньев, формула (5.123) приобретает вид (Р)р(1+ ТгР) (1 + Пр) (IVТ,р) ...(1 + Т„р)• - Этой передаточной функции соответствует л. а. х. типа 1 - 2 - 3 - 4... (рис. 5.16,6), которая также является «несимметричной». В этом случае можно воспользоваться приближенной формулой, ориентировочно связывающей сумму всех постоянных времени с добротностью по скорости и показателем колебательности аналогично выражению (5.125): (5.127) 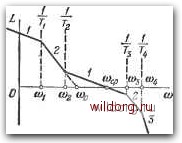 Формула (5.127) дает хорошую точность при М1,3. Она становится точной при М = 1 и произвольном числе постоянных времени п или при и = 1 и любом значении показателя колебательности, когда она переходит в (5.125). Формула (5.127) позволяет также учитывать наличие в канале постоянного временного запаздывания т, которое должно при этом суммироваться с постоянными времени Ti. Типовые л. а. х., изображенные на рис. 5.16, могут использоваться в простейших случаях, т. е. при невысоких требованиях к системе управления в части точности. В более сложных случаях, когда невозможно удовлетворить требованиям по точности, сохраняя при этом достаточный запас устойчивости, приходится переходить к л. а. х. иного типа. На рис. 5.17 изображена асимптотическая л. а. X. типа 1 - 2 - 1 - 2 - 3..., которая соответствует наличию в системе астатизма первого порядка, но позволяет иметь более высокий общий коэффициент усиления (добротность по скорости). Эта л. а. х. может быть получена из л. а. X. типа 2-1 - 2 - 3... добавлением одного излома при сопрягающей частоте coi = T]f; она относится к л. а. X. «симметричного» вида. Л. а. X. типа 1 - 2 - 1 - 2 - 3... соответствует передаточная функция разомкнутой системы Кг(1 + Т,р) Рис. 5.17. «Симметричная» л. а. x. систем с астатизмом первого порядка (тип 1-2- 1-2-3-...). (5.128) Pil + T,p)(l + TsP)(l + T,p) ... (l-\-T„p) Обычно сопрягающая частота щ = 7"f значительно меньше частоты в зоне максимума требуемого запаса по [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [ 129 ] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0135 |