
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [ 155 ] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] Пересчет этой передаточной функции на передаточную функцию последовательного звена (5.249) дает D* ЦК) = Передаточная функция разомкнутой системы использовании принятого значения В* (jX) lF*(A) = D*()lFg(A)-
Ориентировочное значение эквивалентной суммы малых постоянных времени здесь оказывается равным ТТ, что совпадает со случаем использования последовательного корректирующего звена. 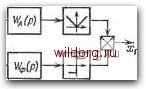 Рис. 5.45. Псевдолинейное корректирующее звено. Это говорит о возможности использования уточненной передаточной функции В (г) вместо исходной Bo(z). При необходимости может быть сделан более точный расчет с построением л. а. х. и л. ф. X. для полученной передаточной функции W* (jK). Псевдолинейные корректирующие устройства. Теория использования нелинейных корректирующих устройств наиболее полно разработана в настоящее время для так называемых псевдолинейных устройств, характеристики которых не зависят от амплитуды входного гармонического сигнала. Это делает их похожими на линейные звенья. Вместе с тем они позволяют формировать отдельно амплитудную и фазовую частотные характеристики устройства, что невозможно для линейных систем. Структурная схема псевдолинейного устройства изображена на рис. 5.45. Верхний канал содержит элемент взятия модуля, а нижний - элемент определения знака сигнала. В верхний канал введено звено формирования амплитудной характеристики с передаточной функцией W{p), а нижний канал -звено формирования фазовой характеристики с передаточной функцией И?ф(р). Выходной сигнал получается перемножением сигналов двух каналов устройства. Исследование подобного устройства проще всего можно провести посредством использования метода гармонической линеаризации [79]. Коэффициенты гармонической линеаризации при выполнении условий для фазовых сдвигов фазового и амплитудного каналов 0=Ффя, -яФО, я -ффФа (5.250) должны определяться в соответствии с выражениями 4 = \Wa (/«) [(4 - I Фа I - Фф) COS ф, + sin I ф J + Н-8ШффС08(ф, + фф)], (5.251) q = i\Wa (/со) I [( - 4 + 1 Фа I + фф) sin I Фа I + + 5Шфф8ш(фЛ-фф) . (5.252) При выполнении условий ОффЯ, -ЯфаО, -Я-фффа - в соответствии с выражениями ?=~- Wa(i(i>)\ (-п +фа + фф)с08фа-5Шфа- -8ШффС08(фа + фф) «7 - I (т [( - I Фа 1 - фф) sin I Фа I --5Шфф8Ш (фa-f фф) (5.253) (5.254) Приведенные формулы соответствуют наиболее важному случаю, когда амплитудный канал создает подавление сигнала и вводит отрицательные фазовые сдвиги, а фазовый канал дает фазовое упреждение. Это позволяет получать необходимые запасы устойчивости в замкнутой системе при амплитудном подавлении сигнала. Можно показать [79], что для приближенных представлений амплитудной и фазовой характеристик псевдолиней- НОГО устройства допустимо использовать приближенные формулы 1 "п. (/co)i = уфМШШ 1 т\ X X [0,64 + 0,361 COS (1 ф,! + фф)] я« I (/со)!, (5.255) Ф„У (со) = arctg фф 0,42 sin 2 (фф +1 ф, ). (5.256) Независимость всех рассмотренных характеристик от амплитуды входного сигнала и послужила поводом для введения термина «псевдолинейное устройство». 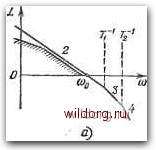 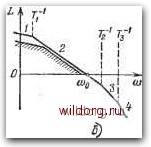 Рис. 5.46. Примеры типовых л. а. х. ири псевдолинейной коррекции. Для случая введения псевдолинейных корректирующих средств желаемые передаточные функции с заданным запасом устойчивости отличаются от тех, которые были рассмотрены в § 5.3. На рис. 5.46 приведены возможные типовые л. а. х. Пересечение оси нуля децибел происходит при наклоне асимптоты л. а. х. -40 дБ/дек. По сравнению с л. а. X. типа 2-1-2-3 и 1-2-1-2-3..., рассмотренными в § 5.3, здесь значительно подавлены высокие частоты, что позволяет получить лучшую фильтрацию помех (рис. 5.34). Непрерывная часть системы Е случае астатизма второго порядка (рис. 5.46, а) имеет передаточную функцию WAP)=--. (5-257) Амплитудный канал псевдолинейного корректирующего устройства содержит при этом звено с передаточной [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [ 155 ] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0515 |
||||||||