
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [ 148 ] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] системах, при технической реализации и при работе в условиях нестабильности параметров объекта и регулятора. Отрицательные обратные связи имеют свойство снижать влияние нелинейных характеристик тех участков цепи управления, которые охватываются обратными связями.
-т°о- 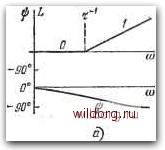 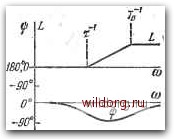 Рис. 5.40. Введение производной по параллельному каналу. Важным свойством отрицательных обратных связей является способность уменьшать постоянные времени тех звеньев, которые они охватывают. Если апериодическое звено первого порядка с передаточной функцией охватывается жесткой отрицательной обратной связью с передаточной функцией Woc(p) = /«oc. то результирующая передаточная функция равна wap) i + wap)WoAp) i+Ac Т.Р 1 -J- coc l+TcuP (5.217) где новые параметры звена вместе с обратной связью имеют вид 1+Мос 1+Мос- (5.218) Из последних выражений видно, что обратная связь в l+kkoe раз уменьшает коэффициент передачи и постоянную времени охватываемого звена. Если отрицательная обратная связь с передаточной функцией Woe (Р) = ос охватывает апериодическое звено второго порядка с передаточной функцией ТО результирующая передаточная функция равна -()-1+Мое П+Г. Д nr.. • (5.219) Из формулы (5.219) следует, что в этом случае в 1 + сос раз уменьшается коэффициент передачи и эквивалентная сумма постоянных времени. Если в первую формулу (5.218) ввести малую вариацию коэффици ента передачи исходного звена k + AK, то приращение коэффициента передачи звена, замкнутого обратной связью, будет равно AcK = -Ae=(Xt0.. (5.220) Относительное приращение результирующего коэффициента передачи оказывается в 1 + kji„e раз меньше относительного приращения коэффициента передачи исходного звена: AftcK 1 Afec Аналогичный эффект получается и при охвате жесткой отрицательной обратной связью более сложных звеньев. Обратные связи могут давать в системе управления в динамическом отношении различные эффекты. Однако, так же как и в случае использования последовательных корректирующих звеньев, здесь можно наметить три основных вида отрицательных обратных связей: 1) обратные связи, подавляющие высокие частоты (аналоги пассивного последовательного интегрирующего звена); 2) обратные связи, подавляющие низкие частоты (аналоги пассивного последовательного дифференцирующего звена); 3) обратные связи, подавляющие средние частоты (аналоги пассивного последовательного интегро-дифферен-цирующего звена). Установить аналогию обратной связи с тем или иным последовательным корректирующим звеном можно по формулам перехода (5.211). Особенно важно иметь возможность перехода от последовательного корректирующего звена к эквивалентной обратной связи. Это определяется тем, что расчетным путем наиболее просто определить параметры последовательного корректирующего звена, а с точки зрения совокупности всех свойств выгодно применять обратные связи. Расчет непрерывных корректирующих средств. В цифровых системах управления возможно использование всех рассмотренных выше непрерывных корректирующих средств: последовательных, параллельных и обратных связей. Как и в случае непрерывных систем, наиболее просто определяются параметры последовательного корректирующего средства. Если желаемая л. а. х. проектируемой системы построена так, что удовлетворяются требования по точности и запасу устойчивости, то оказывается известной желаемая передаточная функция разомкнутой системы (г) = = mo(z). Здесь W„kWo(2) представляет собой дискретную передаточную функцию включенных последовательно последовательного корректирующего устройства с передаточной функцией WnK(p) и непрерывной части (объект с исполнительным устройством) с передаточной функцией Wh(p). Следует иметь в виду, что WWiz) ф W{z)Wo{z). Поэтому расчет последовательных корректирующих устройств в дискретной системе, вообще говоря, не может выполняться делением желаемой передаточной функции на передаточную функцию исходной системы. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [ 148 ] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0177 |
|||||||||||||||