
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [ 149 ] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] Однако в главе 2 было показано, что частотные характеристики дискретных систем, построенных в функции абсолютной псевдочастоты К, для частот К <С 2Т- практически сливаются с частотными характеристиками непрерывной части. Поэтому можно воспользоваться известными приемами расчета последовательных корректирующих средств. Условием определения л. а. х. корректирующих средств (Х) = L>K (К) - L* (к) посредством вычитания из желаемой характеристики Lf,, (Я) располагаемой L* (к) является требование того, чтобы операции над частотными характеристиками производились в области частот k<i2T-. В этой области подобный метод оказывается практически точным, и он может использоваться. При расчете непрерывных корректирующих средств импульсных И дискретных систем управления можно использовать частотные характеристики непрерывной части системы, построенные в функции обычной круговой частоты со. Если в результате такого расчета построена желаемая л. а. х. (ы) непрерывной части, то определение корректирующих средств можно осуществлять вычитанием = - L{(x>), где и L (со) соответствуют л. а. х. последовательного корректирующего устройства и ИСХОДНОЙ л. а. х. Этот метод является достаточно точным, и во многих случаях его использование является весьма удобным. Пример 5.1. Произведем расчет системы с астатизмом первого порядка, с ЦВМ в контуре по следующим исходным данным: максимальная скорость входного воздействия gmax = 30 с , максимальное ускорение входного воздействия g„iax = 15 с~, максимальная допустимая ошибка воспроизведения входного сигнала етах = 0,1, допустимое значение показателя колебательности М = 1,5, период дискретности Г = 0,02 с, передаточная функция непрерывной части совместно с входным и выходным преобразователями имеет вид " = Р(1+Т1Р)(1+Т2Р)(1+ТЗР) где Ti = 0,05c, Та = 0,003 с, Тз = 0,001 с. В системе используется экстраполятор нулевого порядка. Требуется определить вид И параметры непрерывного последовательного корректирующего устройства, которое должно быть вве- дено В канал регулирования, а также необходимое значение общего коэффициента усиления Ki- На рис. 5.41 построены л. а. х. рассчитываемой системы. На рис. 5.41, а построена л. а. х. непрерывной части в функции круговой частоты to. На рис. 5.41,6 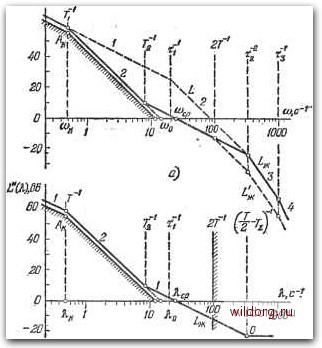 Рис. 4.41. Л. а. X. к расчетному примеру. построена л. а. х. системы совместно с ЦВМ в функции псевдочастоты = -tg-. Построенные л. а. х. L (со) и L* (Я) совпадают в области низких частот, со < 2Т-, когда можно считать, что со?Я. Запретная область для л. а. х. строится по условиям обеспечения требуемой точности. Построение ее аналогично при использовании частот со и Л. Ниже это Постоянная времени корректирующего устройства, формирующая первый излом л. а. х., равна Вторая постоянная времени (см. § 5.3) Требуемое значение общего коэффициента усиления д 30 /Cz = K2 1=1,41 = 420 с-\ •тах Частота среза л. а. х. 420 0Л2.25.2С- построение производится в функции псевдочастоты. Эквивалентная частота Яе = = - = 0,5с-\ 6 max " Базовая частота для запретной области Желаемая асимптотическая л. а. х. в низкочастотной области формируется так, чтобы она проходила в точке излома выше контрольной точки Л> на 3 дБ. Она состоит ИЗ отрезков прямых с наклонами 1-2-1. Это дает желаемую частотную передаточную функцию в низкочастотной области Параметры желаемой передаточной функции определяются следующим образом. Базовая частота л. а. х. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [ 149 ] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0099 |