
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [ 122 ] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] где v -степень астатизма системы. Ограниченное значение модуля входного воздействия В статических системах наклон первой асимптоты л. а. х. нулевой. Поэтому условие нахождения всей л. а. х. выше запретных областей, изображенных на рис. 5.3, не может быть выполнено ни при каком конечном значении общего коэффициента усиления. В связи с этим статические системы могут работать только при наложении дополнительного условия ограничения модуля входного сигнала. Установившаяся ошибка в непрерывной статической системе (рис. 5.1, а) при постоянном входном воздействии g{t)=go определяется выражением уст = (0) = 1+V К фЩ где /С -общий коэффициент усиления разомкнутой системы. Если в системе управления (рис. 5.1, а) применить главную обратную связь, отличающуюся от единицы, и положить кос = тф1, то установившаяся ошибка будет уст =-Y+K- Приравняв числитель (5.60) нулю, можно получить условие отсутствия статической ошибки при постоянном значении входного воздействия /п=. (5.61) При нестабильности коэффициента усиления условие (5.61) нарушается, что ведет к появлению статической ошибки go ДС go „ /с OQ4 где Со - коэффициент ошибки по входному воздействию. Отсюда можно получить требуемое значение общего Я?со. кроме того, требование вещественности корней характеристического уравнения замкнутой системы трансформируется здесь в требование возможности разложения квадрата модуля частотной передаточной функции замкнутой системы для ошибки на простые дроби: коэффициента усиления, если коэффициент ошибки (отношение еу„ к go) задан: Ао -: = 7--JT- (0-63) Со А о Ку„ По Здесь АК/Ко - возможное относительное изменение общего коэффициента усиления, вызванное нестабильностью коэффициентов передачи и коэффициентов усиления отдельных звеньев канала управления. К аналогичному результату может привести масштабирование входной или выходной величины [8]. В системе с единичной обратной связью (рис. 5.1, с) при гармоническом входном воздействии вида g-() = niax X X sin (сод,+%) амплитуда ошибки по-прежнему определяется формулами (5.3) и (5.4). Это дает возможность построить контрольную точку Ak с координатами (5.5) аналогично построению на рис. 5.2, а. Если на входе заданы максимальные по модулю значения входной величины grnax и скорости СС ИЗМСНеНИЯ gmax, ТО МОЖНО ПОДО- брать эквивалентный гармонический входной сигнал §в(0=Явшах8Ш(сОз + я1)з), (5.64) где gsm&x - gmax, э - произвольнэя изчальная фаза, а эквивалентная круговая частота должна быть выбрана так, чтобы выполнялось условие COggmax = graax- ТОГДЗ КООрДИ- наты контрольной точки Лд, (рис. 5.6, а) будут при задании elnax «ai=. Z.(co.x) = 201g. (5.65) при выполнении условий ggmax -gmax И COggmax < niax частота co, будет уменьшаться и точка Л д. будет перемещаться влево по горизонтальной прямой, т. е. по прямой с нулевым наклоном. При выполнении условий §эшах< <gmax И C05gmax=gmax КОНТрОЛЬНаЯ ТОЧКЗ буДбТ ПерСМС- щаться вправо, двигаясь по прямой с отрицательным наклоном 20 дБ/дек. Это справедливо до тех пор, пока ускорение эквивалентного режима меньше максимального заданного на входе ускорения gmax, т. е. пока выполняется условие соэп,ахй£1тг,х. Отсюдз находится предельная частота положения точки Лд на прямой с наклоном 20 дБ/дек: С0э2 = : (5.66) Далее, в соответствии с изложенным выше, точка Ak будет двигаться по прямой с отрицательным наклоном 40 дБ/дек. Эти рассуждения позволяют построить запретную область для л. а. х. так, как показано на рис. 5.6, а. Для того чтобы ошибка в замкнутой системе не превосходила заданного значения efnax» л. а. X. разомкнутой системы должна проходить выше запретной области при соблюдении требования наличия в замкнутой системе достаточного запаса устойчивости. 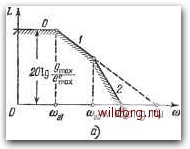  ртох АК! 2"Ч- CO.. Рис. 5.6. Запретные областп но условиям точности для статических систем. Изложенная методика обеспечения заданной точности в статических системах может быть строго обоснована для типовых передаточных функций разомкнутой системы, которые будут рассмотрены более подробно в § 5.3 и § 5.4. Обоснование может быть сделано аналогично тому, как это было проделано выше для астатических систем с использованием спектральных плотностей вида, изображенного на рис. 3.9, в, с последующим обобщением на спектральные плотности произвольного вида. Если в статической системе используется неединичная обратная связь кФ, то, в соответствии с изложенным, верхняя граница запретной области может быть снижена на величину 20 Ig (/Со/А/С). Это показано на рис. 5.6,6. В дискретных системах построение запретной области для л. а. X. будет аналогичным, если выполняется уело- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [ 122 ] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.011 |