
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [ 113 ] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] = - 2рР (О - SvT + 2pD. (4.239) объекта управления Wq (z), то можно определить передаточную функцию ЦВМ (корректирующую программу) = (4.236) В многомерном случае эта операция должна быть сделана для всех каналов управления. В силу ограниченности возможностей программирования, так как можно ориентироваться только на практически реализуемые программы, не всякий оптимальный фильтр может быть точно реализован в ЦАС, что приводит к необходимости использования субоптимальных систем. Пример 4.6. Рассмотрим задачу построения оптимального фильтра, если спектральная плотность полезного сообщения имеет вид (4.187): что соответствует порядку уравнения формирующего фильтра п=1. Спектральная плотность возбуждающего белого шума Q = 2TiD. Спектральная плотность помехи измерения S.a{(i))=N. Примем, что объект управления соответствует апериодическому звену первого порядка с коэффициентом передачи ko и постоянной времени То. Формирующий фильтр изображен на рис. 4.21. Его передаточная функция Из структуры формирующего фильтра следует, что Л = -р. = -Т-, В = \х = Т- и С=1. Подставив эти величины в (4.144), получим дифференциальное уравнение для оптимальной оценки y=Xi: = - г/ {t) + K{t) [g (/) + v(t)-yit)]. (4.238) Структурная схема оптимального фильтра, соответствующая уравнению (4.238), изображена на рис. 4.33. Дисперсионное уравнение (4.154) приобретает здесь вид dP(t) о п/п (О Коэффициент усиления определяется формулой (4.153) через дисперсию ошибки: K{t) (4.240) Найдем сначала установившееся решение нелинейного дифференциального уравнения (4.239). Если положить uft) ff(t) Рис. 4.33. Оптимальный фильтр к примеру 4.6. левую его часть равной нулю, то получим два решения, одно из которых будет положительно, что требуется для дисперсии ошибки: М = ( - 1 + + Sf)• (4.241) Использование Р (со) дает установившееся значение коэффициента усиления из (4.240): K{c) = [-\+Yjr)- (4-242) Если использовать это значение коэффициента в оптимальном фильтре, изображенном на рис. 4.33, то получим случай, определяемый решением уравнения Винера- . Хопфа. jTH)-I- Решение дисперсионного уравнения (4.154) может быть получено на ЭВМ или численными методами. На рис. 4.34 изображен аналоговый вычислитель, решающий дисперсионное уравнение (4.239) для рассматриваемого примера. Однако уравнение (4.239) имеет и аналитическое решение. Для начального условия 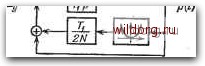 Рис. 4.34. Вычислитель для решения дисперсионного уравнения к примеру 4.6, P(0) = D имеем P(0 = 2pD/-to)(v-l)- L (Y + x)2eV-(Y-M)e-T Здесь использовано обозначение (4.243) (4.244) Нормированные кривые процесса изменения дисперсии ошибки при различных значениях величины 2DgH~N~ приведены на рис. 4.35. Числа, поставленные справа у кривых, показывают раз- ...... . „ 0,007 0,003 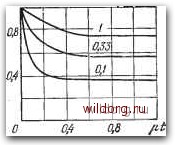 0,001 ность между дисперсией в момент относительного времени р/ = 1, 2 и установившимся значением дисперсии. Передаточная функция стационарной части канала управления в соответствии со схемой на рис. 4.33 и формулой (4.232) Ilic. 4.35. Кривые переходных Wc (р) = „ ] ц ~ "} i у „ процессов для дисперсии к при- Р-ГР меру 4.6. (4.245) Однако реализовать такую передаточную функцию оказывается невозможным. Необходимо преобразовать ее в соответствии с рис. 4.31, чтобы избавиться от множителя Ti в числителе (4.245). Кроме того, следует учесть, что реальный объект имеет другую передаточную функцию. Это требует введения корректирующих средств с передаточной функцией, определяемой формулой (4.243): Wo(p) koi+Tip- (4.246) Передаточная функция (4.246) может быть реализована посредством введения в канал уравнения пассивного [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [ 113 ] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [131] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0146 |