
|
|
|
Главная страница Структура цифровых систем [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [ 131 ] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] При повышенных требованиях, предъявляемых к системе в части ее точности, могут применяться л. а. х., в которых использован типовой «симметричный» переход оси нуля децибел (рис. 5.17). Подобная л. а. х. типа О- 1-2- 1 -2... изображена на рис. 5.19. Она может быть образована из л. а. X. типа 2-1-2-3... (рис. 5.15, б) систем с астатизмом второго порядка или из л. а. X. типа 1- 2-1-2-3... (рис. 5.17) систем с астатизмом первого порядка. Типовой асимптотической л. а. X., изображенной на рис. 5.19, соответствует передаточная функция разомкнутой системы = (1+т,р) (1+Тхр) (f-b ia-f T)...(i+ТпР) (- Базовая частота л. а. х. равна 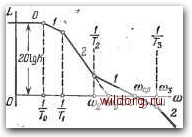 Рис. 5.19. «Симметричная» л. а. х. статической системы (тип О- 1-2 -1-2...). (5.140) При известных значениях То и базовая частота оказывается также известной. Тогда могут быть исполь-зовану формулы (5.113), (5.115), (5.121) и (5.122) для определения требуемого значения постоянной времени Тг и допустимой суммы постоянных времени Т. Эти формулы приобретают здесь вид 2 = il7w п Т.ТгМ K{M~l) (5.141) j VM (M - i) i M tOo M +1 ~ M + 1 (5.142) Т,ТгМ(М-1) K{M-\-l) Учет некоторого дополнительного запаса устойчивости, даваемого отклонением л. а. х., изображенной на рис. 5.19, от л. а. X., систему с астатизмом второго порядка т V т УМ(М-\) ( 1 1 1 = Ъ м + \ К{м+1) К(м+1)- В формулах для допустимой суммы постоянных времени (5.142) или (5.143) может также учитываться постоянное временное запаздывание т, имеющееся в канале управления. Системы, содержащие колебательные звенья. В некоторых случаях объект управления представляет собой колебательное звено с передаточной функцией o(P)=i+2gor!; + rgp- (5.144) где 0 - безразмерный параметр затухания, Ог?о=1. а 9о = - угловая частота свободных колебаний. Иногда объекты регулирования, например гироплатформы, могут иметь более сложную передаточную функцию, но содержать также и подобное звено. Колебательное звено, входящее в усилительный канал, сравнительно легко может быть учтено при формировании типовой л. а. X. в двух случаях: если его собственная частота колебаний значительно меньше частоты среза и если до значительно больше частоты среза. Рассмотрим эти случаи отдельно. В случае низкочастотного колебательного звена практически только л. а. X. симметричного вида дает приемлемые результаты. На рис. 5.20 изображены л. а. х. и л. ф. X. статической системы, включающей в себя колебательное звено. Приведенной л. а. х. соответствует передаточная функция разомкнутой системы (Р) =(1+2£оГоР + Г?Л (1 + Пр)0+Т,р)...{1 + ТпР) • - Для расчетов, связанных с получением требуемого запаса устойчивости, передаточная функция (5.145) может быть заменена эквивалентной функцией (рис. 5.15) в области низких частот, изменяет формулу (5.142). В этом случае она имеет следующий вид [7]: (Vm (М - 1) ( \ \ \ м которая совпадает с (5.119). Значения добротности по ускорению и базовой частоты определяются выражениями (5.147) (5.148) Расчеты могут производиться в соответствии с формулами (5.113) и (5.120). Отличие фазовой характеристики (5.145) в низкочастотной области от фазовой характеристики (5.146), которая изображена на рис. 5.20 пунктиром, дает некоторый дополнительный запас устойчивости. Уточненная формула для допустимой суммы 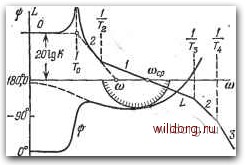 Рис. 5.20. Л. а. X. и л. ф. х. статической системы с низкочастотным колебательным звеном. постоянных времени Т, совпадает с (5.143), если заменить в ней (To + Ti) на 21,оТо- При наличии высокочастотного колебательного звена, т. е. при выполнении условия - где Юо - базовая частота, могут применяться л. а. х. любого типа как несимметричного, так и симметричного вида. Один из случаев изображен па рис. 5.21. При выполнении условия оюо фазовый сдвиг, вносимый колебательным звеном в районе запретной зоны, можно принять равным - arctg 2оТо(й. Поэтому значение 2Со7"о должно входить в общую допустимую сумму постоянных времени Т, определяемую по одной из приведенных выше формул. Для того чтобы избежать появления второй запретной зоны для л. ф. х. в районе пика л. а. х. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] [95] [96] [97] [98] [99] [100] [101] [102] [103] [104] [105] [106] [107] [108] [109] [110] [111] [112] [113] [114] [115] [116] [117] [118] [119] [120] [121] [122] [123] [124] [125] [126] [127] [128] [129] [130] [ 131 ] [132] [133] [134] [135] [136] [137] [138] [139] [140] [141] [142] [143] [144] [145] [146] [147] [148] [149] [150] [151] [152] [153] [154] [155] [156] [157] [158] [159] [160] [161] [162] [163] [164] [165] [166] [167] [168] [169] [170] [171] [172] [173] [174] [175] [176] [177] [178] [179] [180] [181] [182] [183] [184] [185] [186] [187] [188] [189] 0.0126 |