
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [ 73 ] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 7.3. Рациональные структуры адаптивных электроприводов и следящих систем Основные реализованные в промышленности структуры адаптивных систем электропривода приведены на рис. 7.1. Адаптивная система с комбинированной (параметрической и сигнальной) самонастройкой и стационарным наблюдателем Люенбергера (рис. 7.1, а) подробно рассмотрена в работе [19]. Ниже кратко описаны простейшие структуры АСЭМ, содержащие только сигнальную самонастройку и применяемые, главным образом, для станков с программным управлением, роботов-манипуляторов и ГПМ. Адаптивный регулятор жесткого нелинейного нестационарного объекта имел сигнальный алгоритм, построенный по системе АСЭМ (7.8) где fea - коэффициент глубины адаптации; - ошибка в движении между выходной переменной системы у и желаемой переменной эталонной модели у; = у-у>л; Pi, рг-коэффициенты, определяющие устойчивость и качество адаптации, соответственно. Как показало моделирование и промышленные исследования, эталонная модель может иметь второй порядок, что в конкретных достаточно широко распространенных в промышленности приводах ГПМ (станков и роботов-манипуляторов) позволяет ограничиться наблюдателем первого порядка [3, 19]. -------ГГ 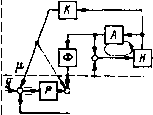 г) ! Г.--т >Q ф1 j»j 1 Т jgyj Рис. 7.1. Рациональные структуры адаптивных электромеханических систем 222 Алгоритм функционирования адаптивного регулятора и его конкретные технические реализации обеспечивают универсальность применения регулятора в различных структурах автоматических систем, содержащих исполнительные приводы, особенно в системах стабилизации скорости или частоты вращения машин и механизмов, в следящих системах с повышенными требованиями к быстродействию и точности, определяющими, в свою очередь, производительность и качество работы промышленного оборудования. Применение адаптивного регулятора особенно эффективно в унифицированных электромеханических системах с подчиненными контурами регулирования. Адаптивный регулятор (АР) функционирует в условиях изменения постоянных времени и петлевого коэффициента усиления адаптируемого контура скорости в 5-10 раз, а также любых параметров внутреннего контура тока до (3-5)-кратного значения. Он выполнен по современной технологии гибридно-интегральныХ схем. Принцип построения АСЭМ по сигнальному типу обеспечил простое схемное решение на пяти операционных усилителях с одной основной регулировкой глубины адаптации. Адаптивный регулятор упругого нелинейного нестационарного объекта [3, 4] также построен по структуре АСЭМ или АСНМ и стационарным наблюдателем упругого двухмассового объекта, вырабатывающим недостающую информацию о движении объекта, конкретно упругий момент и скорость вращения второй массы. Простейший алгоритм имеет следующий вид: zkaSgnipie + piMy + psai), (7.9) где ka - коэффициент глубины адаптации; е = Шзм -«г; «ам - эталонная скорость вращения второй массы; (Og- оценка скорости вращения второй массы; сО], - скорость вращения двигателя; My - оценка упругого момента; р, р, Рз - такие же, как в (7.8). Адаптивный регулятор упругого объекта (АРУО) применяется в электромеханических следящих и других автоматических системах и осуществляет подавление упругих колебаний. Минимально необходимой информацией для восстановления вектора состояний упругого механического объекта является наличие датчика скорости вращения двигателя. Допускается применение регулятора в системах с изменением частот механического резонанса (на декаду) и инерционных масс объекта (3-5)-кратного значения. В этом случае задача подавления упругих колебаний решается принципиально по-иному по сравнению с известными способами. Существенно (на порядок) расширяется полоса пропускания и увеличивается добротность. Вместо гибридно-интегральной схемы может быть применен регулятор, выполненный на обычных микросхемах с помощью навесного монтажа. 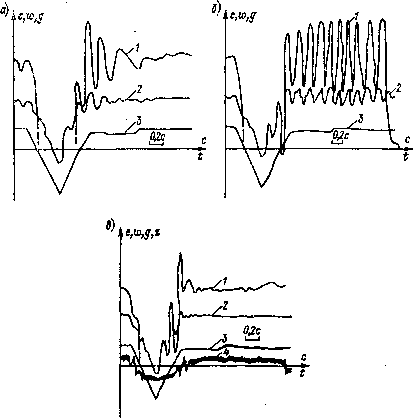 Рис. 7.2. Переходные процессы в следящей системе подачи коордииатно-расточного станка: а - без АРУО с исходной добротностью следящего контура 15 рад-с~*; б - без АРУО с добротностью 100рад-с~*; в - при включенном АРУО с добротностью 100 рад-с"* На рис. 7.2 приведены переходные процессы в программном режиме позиционирования следящего электропривода подачи коор-дянатно-расточного станка с наложением зажима через 0,5 с после окончания цикла позиционирования. Из рисунка видно, что исходная следящая система уже имеет колебательную реакцию, а при повышении добротности система становится неработоспособной - в ней возникают незатухающие колебания. При включении АРУО эти колебания подавляются, создается возможность для повышения точности работы станка в следящих режимах обработки. Адаптивные систшы с настраиваемой моделью, сигнальной настройкой и модальным законом управления [6] (рис. 7.1, б). При использовании в промышленности, особенно в тиристорных элек- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [ 73 ] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0114 |