
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [ 45 ] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] частотные характеристики, электромеханическая система обычйо с достаточной степенью точности может быть представлена многомассовой моделью с сосредоточенными параметрами при числе масс не более трех-четырех, из которых первой является масса двигателя. Ниже рассматриваются расчетные ЛЧХ для четырехмассовой системы в предположении, что масса двигателя связана с первой массой ИО, а три массы исполнительного органа могут быть объединены в кольцевую, разветвленную или рядную схемы. Если механическое демпфирование невелико, задачу определения частот и задачу нахождения коэффициентов механического демпфирования можно разделить, записав передаточные функции, связывающие приращения скоростей отдельных масс механизма со скоростью двигателя при ktj = О, а затем определив коэффициенты демпфирования колебательных звеньев, вошедших в эти передаточные функции. Соответствующие структурные схемы без учета демпфирования приведены в табл. 4. . Считая входным воздействием изменение скорости двигателя cOi и записывая для кольцевой схемы систему уравнений в матричной форме, можно получить на основании выражения (2.3): Д ©1 (р) flip + «2/0* + flgP + 1 Дюз(р) ср+ I , Дш1 (р) flip + «2Р* + "зР + 1 (4.1) ДшИр) Р+ , где коэффициенты полиномов следующим образом связаны с параметрами модели: Ol - TuiTuTuiTii , т лт с82 + £43 + с42 ТмгТмзГсгхТсзг {Tct2->r Тс) + Т„Т,ТсТсп (Тсз2+ Tcз)-\- 4- T„gT„iTci3 iTc2lTci2 -Ь ТсцТсз2 + Tc3iTc2l) Tcii -\- Тем + Г, „ Т IT LT LT\ L ТизТсз2 (Тш + Tcta) + TujTcii {Тсз2-\-Тз) . m "Г с48 "i £42 и Т Т Теза 7,42 Тс43 . 1 - i мз М4-------- Тал + Тс4л + ТсАъ b = "882 (Tc42 ~Ь Тс4з) -- TjTcii (Тсзг.+ Тс4з) . Тсзг + Тсиг -\- Tci3 р TmiTc12Tca3 TgTc3iTcii Tc3t 4" Tci2 + Тс4з Теза + Tct2 -\- Тз Детализированная и преобразованная структурные схемы механической части электромеханической системы, а также вид логарифмических амплитудных частотных характеристик (ЛАЧХ) для кольцевой схемы представлены в первой строке табл. 4.1. Частоты 1/Г1-l/T; могут быть определены в результате нахождения корней полиномов знаменателей и числителей передаточных функций (4.1). Для получения математического описания разветвленной схемы (вторая строка в табл. 4.1) в выражениях для коэффициентов передаточных функций (4.1) надо принять Тз = оо. В рядной схеме надо принять Т = О, в результате чего передаточные функции приобретают вид, показанный на преобразованной схеме в третьей строке табл. 4.1. В результате анализа выражений (4.1) и построенных на их основе логарифмических амплитудных частотных характеристик Lm I Асог {/«)/Дм1 (/ю) , Lm Acog (/a))/Aa)i (/со) и Lm I АСО4 (/cft)/Aa)i (/со) , связывающих со скоростью двигателя скорости, соответственно, второй, третьей и четвертой масс, можно отметить их особенности: 1. Для рядной схемы характерно отсутствие в характеристике Lm АСО4 (/a))/Aa)i (/со)] провалов; частота провала в характеристике Lm Awg (/a))/A©i (/а)) совпадает с частотой одного из провалов в Lm Асоа (/a))/Aa)i (/со) . 2. Разветвленная схема характеризуется наличием провала ЛАЧХ как в Lm Acoj (/a))/A(Oi (/со) так и в Lm Асо (/(o)/A(Oi (/(о) частота каждого из них совпадает с частотой одного из провалов характеристики Lm Aa)2(/)/Aft)i(/a)). 3. Характеристики кольцевой схемы внешне не отличаются от характеристик разветвленной схемы, но частоты всех провалов в Lm j Ай) (jaj/Aai (/со) , Lm Ащ (/a))/A(»i Ц(о) и Lm I Аа)4 (/a))/Aa)i (/со) различны. Зная особенности ЛАЧХ, соответствующих различным конфигурациям модели, можно с наибольшей степенью достоверности аппроксимировать экспериментальные ЛЧХ характеристиками модели того или иного вида. Простейший способ экспериментального определения комплекта ЛЧХ объекта состоит в снятии и последующей обработке осциллограмм вынужденных колебаний элементов конструкции, возбуждаемых синусоидальными сигналами различной частоты на входе системы. Достоинством способа является возможность одновременной фиксации нескольких координат объекта. Однако метод требует большого объема ручной работы. Рядяая схема 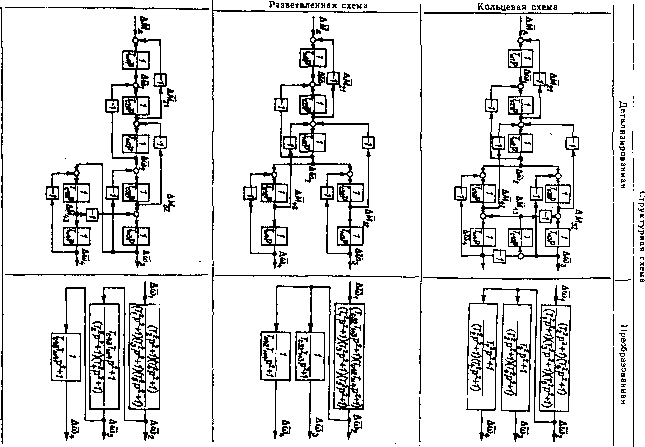 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [ 45 ] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0129 |