
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [ 51 ] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] -1-1 1 - I-I-lLl 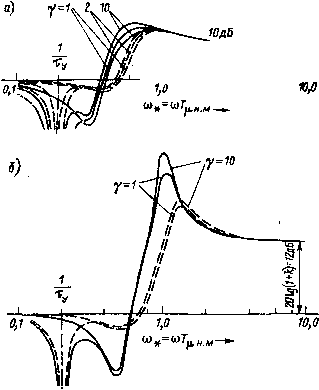 Рис. 4.6. ЛАЧХ сомножителя S (/со*) при Ту = 5; а = 2,5: а - при Л = 1; б - при k = Ъ Тм.р = 1,55 с. Ставилась задача обеспечить Гм1 = 2Тм.р = 3,1 с {к - 1). На рис. 4.7, а показан пуск двигателя под контролем тока в системе без упругости и без моделирования механической постоянной времени, а на рис. 4.7, б - при том же токе ограничения и включенной модели Ti- На рис. 4.7, в иллюстрируется работа системы с моделированием Tui и упругого механизма. Моделируемая механическая постоянная времени второй массы 7"м2 = 1,55 с при Ту =0,1 с. Коэффициент наблюдателя был равен / = 42, т. е. I* = 1Т„,„ = 42-0,02 = 0,84. В испытуемой АСУ ЭП с подчиненным токовым контуром для обеспечения плавного движения ИО введена дополнительная корректирующая связь по производной от скорости исполнительного органа coj («шз) с постоянной времени To.ci = 0,11 с [см. форм. (2.36)1. Коэффициент регулятора скорости при этом составлял fep.c = 19,5. Переходный процесс при скачке управляющего воздействия «у на входе контура скорости хорощо 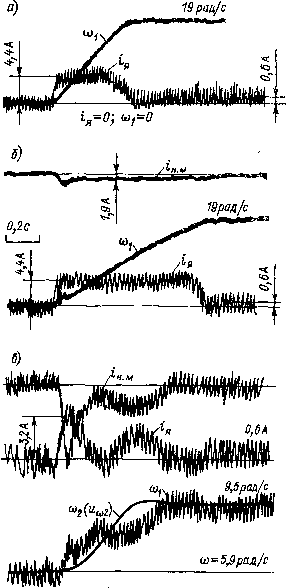 Рис. 4.7. Результаты эксперимента на установке полунатурного моделирования: о - жесткая система при отключенной системе моделирования; б - то же при включенной системе моделирования Ti\ в - при моделировании упругой системы совпадает с расчетным, который должен иметь место в моделируемой АСУ ЭП. Как следует из сказанного, существуют ограничении па использование описанного способа моделирования, связанные с тем, что при Гм1/Тм.р>5 может оказаться необходимой установка дополнительного маховика на валу двигателя. Кроме этого, условия устойчивости контура моделирования упругости усложняются при необходимости моделирования многомассового механизма. 4.3. Автоматизация процесса настройки АСУ ЭП с упругостью В процессе наладки АСУ ЭП с упругостью в натурных условиях часто оказывается необходимым корректировать параметры регулятора для получения желаемой динамики, особенно, если ИО представляет собой многомассовую систему. Причиной этого является, в первую очередь, недостаточная точность математического описания объекта, а может быть и ошибки, допущенные в процессе проектирования, наличие неучтенных звеньев с малыми постоянными времени и т. п. Если в обычной системе подчиненного регулирования с жестким объектом такая корректировка сводится обычно к изменению одного или двух параметров регулятора скорости и может быть выполнена вручную, то в системе, построенной по принципам модального управления с использованием наблюдателя, число параметров, подлежащих корректировке, оказывается значительным, благодаря чему процесс настройки становится весьма трудоемким и требующим высокой профессиональной подготовки. Это делает целесообразной автоматизацию настройки с использованием вычислительных средств управляющего вычислительного комплекса, входящего в состав АСУ ЭП. В процессе настройки предлагается добиваться минимума квадратичного функционала от разности между взятыми в соответствующих масштабах скоростями эталонной модели щ и реальной системы со, представляющими собой реакцию на ступенчатое управляющее воздействие: J =.-1- l[(,(t)~<o{()]4i. (4.12) Соответствующая структурная схема применительно к двухмас-совому объекту приведена на рис. 4.8, АСУ ЭП выподнена по схеме рис. 2.23 с наблюдателем и модальным регулятором. Токовый контур представлен звеном второго порядка, настроенным на оптимум по модулю. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [ 51 ] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0121 |