
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [ 63 ] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 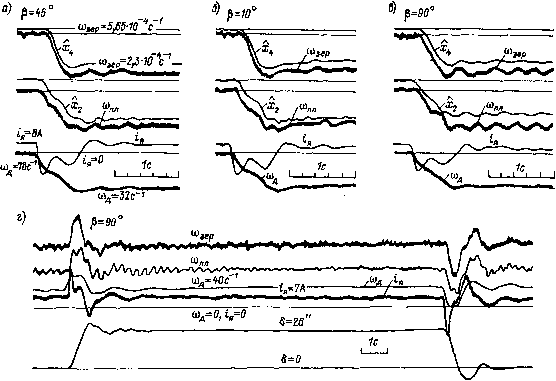 Рис. 5.13. Экспериментальные переходные процессы в системе, замкнутой через наблюдатель; а, б, в - скоростная подсистема; г -• следящий электропривод ©зер - МОЖНО судить 0 ТОМ, как введение связи наблюдателя приближает переходные характеристики наблюдателя к переходным характеристикам объекта. На рис. 5.12, а, б и в иллюстрируется тот же эффект, но уже при угле места р - 90°, где частотные характеристики объекта в наибольшей степени отличаются от характеристик при р = 45°, при которых осуществлена настройка модели. Наличие биений «эер-4 на рис. 5.12, а указывает на несовпадение резонансных частот объекта и модели, а их отсутствие в соответствующей кривой на рис. 5.12, б - на подстройку наблюдателя в результате введения связи для I = \0. Переходные процессы в системе, замкнутой через наблюдатель при трех положениях зеркала по углу места, показаны на рис. 5.13, а, б, в. Переходные характеристики при р = 45° почти совпадают с расчетными. При р = 10° они не меняются сколько-нибудь значительно. При р = 90° (в зените) в скорости зеркала и платформы содержатся колебания на втором резонансном токе при © да да 20 с-Ч Переходный процесс в следящем электроприводе со скоростной подсистемой, замкнутой через наблюдающее устройство, при согласовании с углом б = 26" показан на рис. 5.13, г. Регулятор положения выполнен как пропорционально-интегрально-дифференциальный с параметрами, определенными по формулам (5.9) при ©о = 11 с"Ч Достигнутое при этом быстродействие в 2-2,5 раза превышает быстродействие, реализованное в штатной схеме со скоростным контуром, замкнутым только по скорости , двигателя. Исследования, в ходе которыхак скоростная подсистема, так и следящий электропривод со скоростной подсистемой, замкнутой через упрощенный наблюдатель, работал при разных положениях по углу места, разных скоростях и углах атаки ветра, подтвердили работоспособность и безотказность разработанной системы, не требующей перенастройки во всем диапазоне возникающих при этом изменений параметров объекта. 13 Заказ № 398 ГЛАВА ШЕСТАЯ ИССЛЕДОВАНИЕ ДИНАМИКИ И СИНТЕЗ ВЗАИМОСВЯЗАННЫХ СИСТЕМ ЭЛЕКТРОПРИВОДА ИСПЫТАТЕЛЬНЫХ СТЕНДОВ МЕХАНИЧЕСКИХ ТРАНСМИССИЙ 6.1. Принцип построения автоматических систем управления электроприводом испытательных стендов. Представление объекта в структурно-матричной форме Необходимость улучшения конструкции машин, а также повышения экономичности производства и проектирования приводит к тому, что в практику все шире внедряются испытания наиболее ответственных узлов конструкций на специальных испытательных стендах. Одним из типов узлов, проходящих такие испытания, являются механические трансмиссии, которые в некоторых случаях представляют собой длинный (до 10-12 м) полый вал и ряд промежуточных редукторов. При проведении их стендовых испытаний необходимо моделировать нагрузки, характер изменения которых в процессе испытаний соответствует реальным режимам работы. Момент нагрузки испытуемой трансмиссии может принципиально создаваться механическим тормозом, электромагнитной муфтой, гидравлическим устройством, но наиболее экономичными и удовлетворяющими техническим требованиям являются системы, в которых требуемый момент создается с помощью тормозных генераторов. Мощность их достигает сотен киловатт. Кинематическая схема стенда показана на рис. 6.1, а. Его основным назначением является вращение испытуемой трансмиссии с требуемой скоростью и создание в ней нагрузок, соответствующих заданной циклограмме. Представление о характере циклограммы для некоторого конкретного случая дает рис. 6.1, б. Характерными требованиями к электроприводу испытательных стендов механических трансмиссий (ИСМТ) являются: регулирование скорости в диапазоне до 2 : 1, точность стабилизации скорости порядка 1 %, регулирование момента нагрузки от нуля до максимального значения при точности воспроизведения заданного значения момента около 1 %, обеспечение времени нарастания и спадания нагрузки в пределах 0,2 с при перерегулировании не более 10-15%. Основные затруднения вызывает реализация точности стабилизации момента и, особенно, обеспечение малого времени его нарастания. Причина этих трудностей в значительной степени обусловливается упругими свойствами испытуемой трансмиссии [481. В соответствии с требованиями силовая часть стенда должна [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [ 63 ] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0131 |