
|
|
|
Главная страница Упругие связи [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] то можно получить передаточную функцию разомкнутого контуря, настроенного на симметричный оптимум (СО) [97]: Вид соответствующих частотных характеристик показан из. рис. 1.2. Передаточная функция замкнутого контура по управлению 1Гз (р) --i!>dLi-. (1.7) (2V+l)(4r>+2V-Ul) При ступенчатом управляющем воздействии время первого достижения выходной величиной установившегося значения в контуре, настроенном на СО, составляет 3,1 Т, а максимальное перерегулирование достигает 43 % (рис. 1.3, а). Зато длительность переходного процесса по возмущению, определяемого выражением lELa 4Гцр (Тцр + 1) Д2(р) &ту{Тр-\-\) + АТр+1 зависит только от значения малой постоянной времени контура и не зависит от параметров объекта (рис. 1.3,6). Настройка регулятора на Тр = 47 может быть произведена и в том случае, когда объект представляет собой апериодическое звено. В отличие от характеристики, соответствующей настройке на СО, логарифмическая амплитудная частотная характеристика (ЛАЧХ) разомкнутого контура в этом случае имеет излом при частоте (О = 1/Tq (штрихпунктир на рис. 1.2). Если Го в 10-20 раз больше 4T, то в зоне существенных частот характеристики контура почти совпадают с характеристиками при СО и сказанное выше о соответствующих переходных процессах справедливо. Чем меньше Гц по сравнению с , тем больше запас по фазе и тем меньше перерегулирование при скачке управляющего воздействия. Максимальное отклонение кривой (A( Az) = / {i/T) тоже уменьшается. При = 47 переходные процессы соответствуют процессам при настройке на ОМ. Если Tq < 4Т, настройка регулятора на Тр = 47 теряет смысл. Следует иметь в виду, что умень-щение максимального отклонения кривой (Ay/Az) = f (tlT) в контуре с меньшим значением по сравнению с контуром с большим при прочих равных условиях не означает уменьшения максимального значения AylAz, так как для перехода к действительной величине отклонения ординаты нормированной кривой надо умножать на коэффициент 27 kkJT, который тем больше, чем меньше Гц. Если Uo (р) определяется выражением (1.5), то, применяя ПИД-регулятор и предполагая, что Го > Гр, и Го > 4Гц, нужно выбрать: при Го1>4Г Tpi = Tgi, = 4Гд; Рр = при Го1<4Г„ Тр1 - 47; Трз - Гох; Рр - ° Изложенные принципы коррекции применяются и для контуров, имеющих больщее число инерционных звеньев, чем рассмотренные. В этом случае из числа постоянных времени выбирают одну (или две, если применяется ПИД-регулятор) - наибольшую, влияние которой на переходный процесс стремятся исключить. Для определения параметров регулятора остальные постоянные Г, Тцг Q}3 • • • складывают и в приведенные выше формулы подставляют 7ц = Гр1 + Гдг + Гдз+ .... Поскольку соответствующий выбор параметров регулятора обеспечивает частоту среза разомкнутого контура, равную (27")", погрешность от упрощения вида ЛЧХ в области частот, расположенной более чем на октаву правее частоты среза, оказывается небольшой. Звенья с малыми постоянными времени могут располагаться не только в прямом канале, но и в канале обратной связи. Выведены формулы настроек, обеспечивающих в этом случае наибольшее приближение переходного процесса на выходе контура к стандартному [361. Однако, как правило, запаздывание в цепи обратной связи определяется лишь фильтрами на выходе датчиков регулируемой величины и невелико. В этом случае разница между характером изменения самой регулируемой величины и выходного напряжения датчика незначительна. Особенно широко распространены стандартные настройки в системах с подчиненными контурами регулирования. Система при этом структурно разбивается на несколько контуров, каждый из которых содержит свой объект регулирования. Настройка внутреннего контура производится на ОМ или СО. Внешний по отношению к нему контур включает в себя собственный объект, звенья с малыми постоянными времени и замкнутый внутренний контур. При расчете параметров регулятора внешнего контура внутренний контур учитывается как звено с некоторой эквивалентной малой постоянной времени. В свою очередь, рассматриваемый контур может быть внутренним по отношению к последующему. Такой принцип построения системы упрощает ее настройку, обеспечивает высокое быстродействие системы и простое ограничение выходных величин внутренних контуров в результате ограничения выходных напряжений регуляторов внешних контуров. 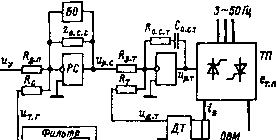 рис. 1.4. Унифицированная система регулирования скорости с подчиненным токовым контуром Вместе с тем отметим, что {Рассмотренные способы настройки систем не распространяются непосредственно на объекты, содержащие слабодемпфированные колебательные звенья. Оптимизация унифицированной системы управления электроприводом при жесткой связи двигателя и механизма. В тех случаях, когда систему электропривода можно рассматривать как жесткую, влияние механизма на работу электропривода сказывается лишь в увеличении суммарного момента инерции, который складывается нз момента инерции J электродвигателя М с редуктором Р (рис. 1.4) и приведенного к двигателю момента инерции J исполнительного механизма ИМ: J = J1 + J. Приложение момента нагрузки к механизму после приведения его значения к валу двигателя совершенно идентично приложению момента нагрузки непосредственно к валу двигателя. С учетом этих условий рассмотрим принцип оптимизации жестких унифицированных автоматических систем управления электроприводами на примере системы регулирования скорости с подчиненным токовым контуром. Современные системы строятся на ий1егральных усилителях с высоким собственным коэффициентом усиления. Это позволяет использовать передаточные функции регуляторов, записанные для усилителя с бесконечно большим коэффициентом усиления, как это было сделано выше. Работа системы (рис. 1.4) становится ясной из рассмотрения режима пуска. Если не предусматривается использование устрой-.ства задания интенсивности, пуск осуществляется путем подачи на вход задания скорости регулятора скорости PC напряжения управления щ. Под действием большого входного сигнала на выходе PC устанавливается напряжение ограничения, значение которого определяется настройкой блока ограничения £0, и ко- [0] [1] [ 2 ] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0152 |