
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [ 61 ] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 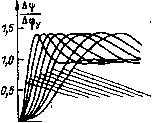 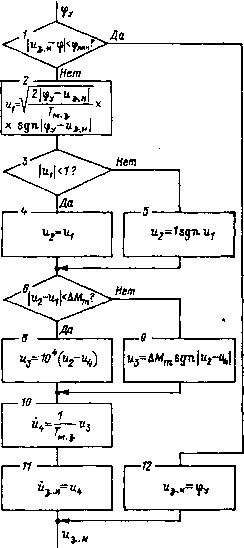 г+1=д5 в 7 д910 i.,, J \ У 10 15 20 Рис. 5.8. К выбору стандартной формы распределения корней Рнс. 5.9. Алгоритм работы за-датчика интенсивности на входе контура положения геометрический корень контура положения связан с СГК скоростной подсистемы соотношением ©01 = 0,475й)о- (5.8) Параметры ПИ-регулятора положения должны быть выбраны по формулам pp. п = 0,22й)о; Тр. п = 9,1 /©о- (5.9) Аналогично для системы стрехмассовым механизмом: ©01 = 0,51 ©о; (5.10) Рр.п=0,14©о; Тр. п=14,4/©о. (5.11) Быстродействие контура положения в обоих случаях приблизительно в два раза ниже быстродействия скоростной подсистемы, что соответствует соотношению частот среза контуров положения и скорости в «жесткой» системе подчиненного регулирования. Для компенсации уменьшения запаса по фазе, связанного с отличием реальной передаточной функции скоростной подсистемы от упрощенной, положенной в основу приведенных выше выкладок, целесообразно вместо ПИ-регулятора положения применить ПИД-регулятор с передаточной функцией Гр.п(р) = рр.п (Р-"Р+И7-р.п.Р+1) (5 12) в которой Рр.„ и 7p.ni = Тр,„ выбраны по формулам (5.9) или (5.11). Кроме основного следящего режима, электроприводом должны плавно н без перерегулирования отрабатываться большие и средние установочные перемещения. В электроприводе с жесткой связью между двигателем и ИО это достигается применением безынерционного параболического регулятора положения, в результате чего, ограничивая сигнал на входе токового контура, ток якоря можно поддерживать равным предельно допустимому значению как при разгоне, так и при торможении [7]. В следящем электроприводе с упругостью и подчиненной системой управления скоростью ИО применение такой схемы невозможно, так как при этом размыкаются внешние по отношению к контуру тока связи и упругие колебания перестают демпфироваться электроприводом. Радикальное решение вопроса при задании предписанного значения и вычисления ошибки рассогласования с помощью управляющей ЭВМ состоит в формировании требуемого закона изменения управляющего воздействия на входе замкнутого контура положения с помощью задатчика интенсивности, реализуемого в виде расчетного алгоритма. Структурная схема алгоритма приведена на рис. 5.9. В следящем режиме, когда разница между предписанным значением и сигналом на выходе задатчика интенсивности Ыз.и не превышает значения флин, для отработки которого не требуется ток, больший предельно допустимого, значение фу подается непосредственно на вход контура положения. В режиме отработки средних и больших перемещений задатчик интенсивности, представляющий собой модель идеализированной системы регулирования положения с параболическим регулятором положения и объектом с механической постоянной времени Тм.з, равной суммарной механической постоянной времени объекта, обеспечивает изменение напряжения Ыз.„.по закону, соответствующему закону изменения положения при треугольном или трапецеидальном характере скорости (в задатчике- напряжения и4). В процессе настройки темп изменения напряжения «з.и при том же характере зависимости Ыз.и = / (О можно варьировать, выбирая значение Гм.з большим или меньшим реального значения механической постоянной времени объекта. 5.4. Результаты экспериментальной отработки следящего электропривода на радиотелескопе Структурная схема следящего электропривода азимутальной оси приведена на рис. 5.10. Токовые контуры представлены в виде звеньев второго порядка, настроенных на оптимум по модулю. Поскольку в расчетах используются значения Т; 721 и 7„2, отнесенные к эквивалентному двигателю, заменяющему двухдви-гательный привод, на схеме в каждом канале присутствуют постоянные времени Tmi/2 и 2Г21 и коэффициент 21/2. Наблюдатель построен на базе трехмассовой модели, невязка выделяется как ©3-Xi, где ©3 = 0)36? - скорость зеркала, Xi - выходная координата наблюдателя. Сравнение сигнала задания на скоростную подсистему с результирующим сигналом обратной связи производится на входе устройства выборки зазора УВЗ. Коэффициент kp.c в прямом канале, равный сумме коэффициентов обратных связей по скорости ki + кз + fej, обеспечивает равенство единице коэффициента передачи замкнутой скоростной подсистемы в уста-новивщемся режиме. Регулятор положения в рабочем режиме имеет передаточную функцию (5.12). Сигнал фу подается на него через задатчик интенсивности ЗИ. При больщих рассогласованиях регулятор положения переводится в режим пропорционального. Это обеспечивается переключением электронного ключа 5 под контролем сигнала на его входе. Параметры наблюдателя и регулятора скоростной подсистемы соответствовали значениям приведенным в § 5.2. Скорость зеркала измерялась с помощью гироскопического датчика угловой скорости, ориентация которого в пространстве не зависела от положения зеркала по углу места. Наблюдатель был построен на интегральных операционных усилителях. Отметим, что отлаженный по расчетным данным в лаборатории наблюдатель не потребовал никакой подстройки на объекте и безотказно функционировал в течение всего периода исследований. Перечисленные ниже осциллограммы иллюстрируют процесс поэтапного замыкания скоростной подсистемы. Возможность такого замыкания отмечалась в гл. 2 как достоинство наблюдателя, управляемого скоростью двигателя. На рис. 5.11, а показаны переходные процессы для скоростной подсистемы, замкнутой толькопо скорости двигателя, при коэффициенте регулятора скорости fep.c = ki. Скорость двигателя изменяется как в жесткой системе. В скоростях зеркала ©зер и платформы ©пл наблюдаются колебания с частотой первого резонанса, затухающие только в результате действия диссипативных сил. Сигнал скорости двигателя подается на наблюдатель при отсутствии связи наблюдателя (/ = 0). В результате наблюдатель ведет себя [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [ 61 ] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0093 |