
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [ 58 ] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] Для разомкнутой системы можно записать: Хц Хц A, ,-B„[kD, 1 А, „ Aii-iC] I Ац-п BhCj LCn -B„kD„ О Ah -- LCh Auy + Bmll Me. (5.1) Коэффициенты регулятора определяются по структуре, включающей в себя невосстанавливаемую часть объекта и модель соответственно с векторами выходных координат Х] и Хц (при L = 0). Поскольку в рассматриваемом случае (7mi + -f Т„з + + 7„4)/Г„1 » 1, влиянием связи с передаточной матрицей Aj.u на стадии определения коэффициентов можно пренебречь. Тогда Если по-прежнему считать, что токовый контур описывается звеном второго порядка (2.16), то при Xj = col UiXaXg], где = = Ai„; Xg = A coi, и Xji = col {х1„х„ХзаХ4н], где х-хп - выходные координаты модели (а при L-O - выходные координаты наблюдателя), входящие в выражения (5.2), матрицы имеют вид:
с1ы C, = [0 0 1]; Г 2
к = [0 О fei Й2 3 4 ky< Di = Матрица Dj имеет размер 7 X 3, а - 7x4, через I3 н I4 обозначены единичные матрицы 3-го и 4-го порядка. Начала Ввод п-5- ])=detA Hemes гг7- 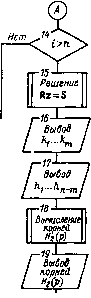 2(Й-V (Конец) 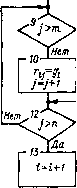 линома а (р), образующие im/Ji • • . /Z„ mJ, могут быТЬ матричного уравнения Rz = S, рицы R определяются как Гц = Рис. 5.5. Алгоритм определения коэффициентов регулятора скоростной подсистемы Аналогично изложенному в § 2.3 применительно к двухмассовой системе, задача сводится к определению матрицы регулятора к, при реализации которой обеспечивалось бы желаемое распределение управляемых корней при незначительном влиянии неуправляемых. Для ее решения разработан алгоритм расчета коэффициентов регулятора и значений неуправляемых корней в системе /г-го порядка при т связей по координатам объекта Чтобы воспользоваться им, надо выражения (5.2) записать в виде: x = AoX+B„u; u = Auy -кх, где первые т элементов вектора координат X ирпользуются для введения связей при к = [/fe . . . . . .01. Характеристический полином замкнутой системы представляется как Я° (р) == = Я? (р) Н, {р) при Я? (р) = + . . . +щ\Н2{р)= -f + hi уэ"-"- + /j2P"-«-2 +. . . -f + hnm- Если матричную передаточную функцию объекта х(р)/и(р) = [р1-Ао1-1 В„ записать в виде X {р)1и (р) =g {р)1 det [р\-АоЬ то коэффициенты регулятора и коэффициенты по-вектор-столбец z = col {1 . . . найдены в результате решения в котором элементы [п X /г)-мат- gi ipi) при / < т; ги= Hi (pi) pf при / > т, где gi {pi) - элемент матрицы-столбца g {р), номер которого равен /, pi - число, образованное как р; р + dp; + \-2dp . . . , где d - шаг варьирования pi. Элементы матрицы-столбца S вычисляются как s, = (pi)"" - det [pi I-Ао). При известных коэффициентах . . . hm определяются корни полинома Hiip). Структурная схема алгоритма приведена на рис. 5.5. Расчет производится для ряда значений ©о, после чего выбирается такое, при котором неуправляемые корни будут располагаться вне окружности с радиусом, в два раза превышающим радиус окружности управляемых корней. 3. При четырехмассовой разветвленной модели объекта (см. табл. 4.1) с учетом демпфирования матрицы, входящие в уравнение (5.1), имеют вид: i-i - И-11 = Ап-1 с21 о о о [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [ 58 ] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0099 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||