
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [ 49 ] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 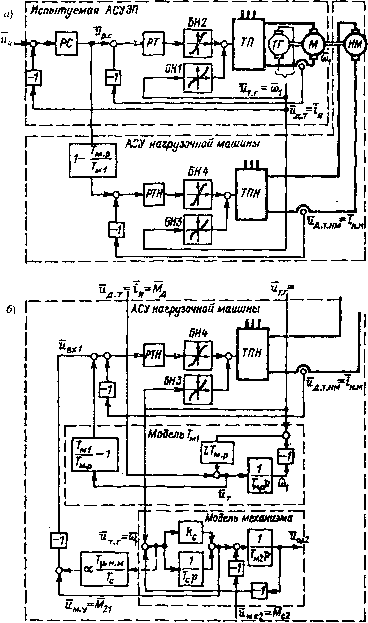 5, КящюНМ Рис. 4.4. Функциональная схема системы полунатурного моделирования: а - моделирование Г„1 с введением сигнала по якорному току; б - моделирование Г„1 и упругости предназначенного для компенсации влияния зоны прерывистых токов. Аналогично выполнена система управления током нагрузочной машины НМ с блоками нелинейности БНЗ и БН4. Это дает основание рассматривать контуры тока с регуляторами РТ и РТН как близкие к линейным со стандартной настройкой на оптимум по модулю. Возможны два способа моделирования механической постоянной времени: путем введения в контур тока нагрузочной машины сигнала задания тока якоря испытуемого двигателя или введением сигнала по его ускорению (производной от скорости). Достоинством первого способа является отсутствие дополнительных замкнутых контуров, что теоретически позволяет, не заботясь об устойчивости системы, существенно увеличивать значение моделируемой постоянной времени T„i по сравнению с реальной механической постоянной времени Тмр агрегата, состоящего нз испытуемого двигателя и нагрузочной машины. Кроме того, влияние замедления контура тока нагрузочной машины при отработке управляющего сигнала можно исключить, если для управления током нагрузочной машины использовать сигнал регулятора скорости Ыр.с, как это показано на рис. 4.4, а. При выборе масштабирующего коэффициента на входе токового контура НМ равным 1-Ты.р/Тм1 в относительных единицах можно записать 0), = [[W, э (P)-(I--) W, 3. „. м (Р)] «р. с- Mei Даже, если силовые элементы токовых контуров не одинаковы, можно обеспечить примерное равенство передаточных функций замкнутых j<oHTypoB тока двигателя и нагрузочной машины Г/3 (р) Г/з.н.м (р) и тогда «1 ip) - W, 3 ip) -г (up. с-- Мег) . где Mci - момент нагрузки на валу агрегата. Очевидно, что реакция моделирующей установки на сигнал регулятора скорости Ыр.с соответствует реакции привода с моделируемой постоянной времени Tui. Но момент нагрузки на валу двигателя Mi возрастает в Гмх/Гм.р раз, что является недостатком рассматриваемой схемы и при значительном моменте трения может сделать ее неработоспособной. Второй способ может быть реализован с использованием датчика ускорения либо при дифференцировании сигнала датчика скорости двигателя «тг. Чтобы избежать дифференцирования, можно воспользоваться простейшим аналоговым или цифровым наблюдающим устройством, сигналом управления для которого является ток якоря, а сигнал ошибки выделяется как - (модель Тых на рнс. 4.4, б). Для скорости двигателя Wi и восстановленной скорости со можно записать: тм. рр 1/я-/Г„. p((Oi-M,)]- Выражая ток нагрузочной машины через напряжение на входе интегратора 1/(Т„.р р) наблюдающего устройства как /н „ = F,3.„.m(p) --1)Ut+«bxi" L\ м. р Ыт = г я - 1Т„. р («1 - wi) = -, , (тм. ppoji + / 1ря). пр + 1 можно получить [l-wi 3. н.м (Р) Р (Р+ 7я МсХ-/з.н м(Р)»ВХ1 Г„. рр[1 + Г/з. п.ы{р)к(1-р+ (4.7) где k = Tmi/Tmp- 1. Из этого выражения следует, что при / и Г,з.н.м ip) 1 tmip Устойчивость модели определяется в результате анализа передаточной функции Wu (р) = W/j.H.»{p) k (tp + l)-i. Очевидно, что устойчивость зависит от соотношения между малой постоянной времени токового контура нагрузочной машины Гн. м, входящей в W/3.h.m(p), и постоянной времени 1, а также от требуемого увеличения механической постоянной времени t„i по отношению к Гм.р- При k = I, т. е. при тщиы.р = 2, низкочастотная часть логарифмической амплитудной частотной характеристики Lm „(/(0) совпадает с осью абсцисс. При k > 1 можно определить запас по фазе Дф. На рис. 4.5 построены зависимости Дф от коэффициента /* = itph. м в предположении, что в зоне частоты среза передаточная функция замкнутого контура тока нагрузочной машины с достаточной степенью точности аппроксимируется выражением 1Р/з.н.м(р) 2Т„. „р (Тдн. мР + 1) + (4.8) При й < 4 запас устойчивости существует при любых значениях хотя при соизмеримых 7н, м и Г оказывается достаточно малым. Однако уже при = 5 контур моделирования T.mi может стать неустойчивым. Условия устойчивости останутся такими же [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [ 49 ] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0126 |