
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [ 92 ] [93] [94] 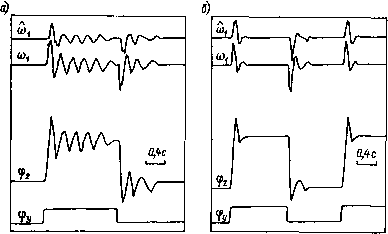 Рис. 8.12. Реакция жесткой следящей системы с зазором иа прямоугольное задающее воздействие; а - исходная система; б - система с AMP Испытания разработанного регулятора проводились также на стенде следящей системы с двухмассовой физической моделью электромеханического объекта (у = 3,9) и БМП, имитирующими привод реальной антенной установки. На рис. 8.13 проиллюстрирован эффект гашения автоколебаний, возникающих в упругой системе с зазором (при отработке гармонического входного воздействия с амплитудой 41,3° и частотой 0,16 Гц), с помощью обратной связи по оценке упругого момента, получаемой посредством адаптивно-модального регулятора. Обратная связь по оценке скорости механизма при этом не используется. Уменьшение амплитуды пульсаций скорости и неравномерности движения вала механизма происходит без снижения добротности системы по сравнению с исходной. Полоса пропускания следящей системы с AMP ©„р = 0,73 ©gj, тогда как в исходной системе ©пр = 0,5 ©jj, где ©21 - частота механического резонанса. Редуцированный адаптивно-модальный регулятор третьего порядка, помимо стендовых испытаний, был тщательно исследован в составе двухканальной следящей системы антенной установки с бесконтактным моментным приводом, построенным на базе двигателя ДБМ 120-1 со встроенным датчиком положения ротора типа ВТ-60. Некоторые результаты этих исследований приведены ниже. В следящей системе первого канала электромеханический объект характеризуется коэффициентом соотношения масс у = 1,35 и низшей резонансной частотой ©21 = 135 с~Ч В электроприводе имеется дополнительный момент нагрузки (небаланса), вследствие чего зазор в передаче выбран во всех режимах работы. Во втором канале 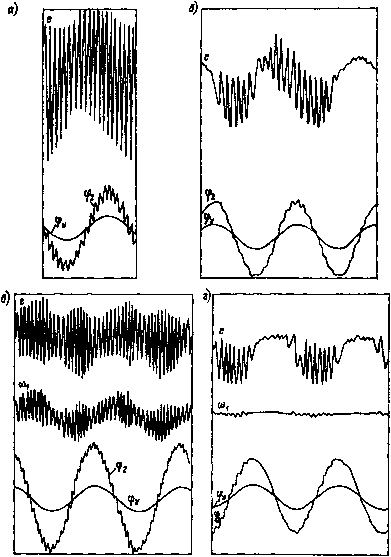 Рис. 8.13. Реакция следящей системы с упругостью и зазором иа гармоническое задающее воздействие. Введены обратные связи: а - по скорости двигателя (с выхода тахогенератора); б - по скорости двигателя и оценке упругого момента (с выхода AMP); в - по оценке скорости двигателя (с выхода AMP); г - по оценкам скорости двигателя и упругого момента момент нагрузки отсутствует, «мертвый» ход механизма (ширина зазора) составляет шесть угловых минут, коэффициент соотноше- 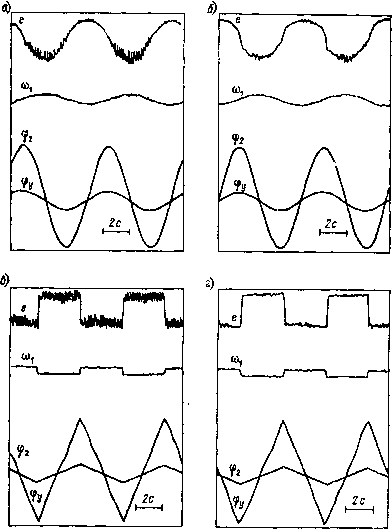 Рис. 8.14. Реакция следящей системы иа гармоническое (а, б) и треугольное (в, г) задающие воздействия с амплитудой ± 5° и частотой 0,16 Гц. Введены обратные связи: а, в - по скорости двигателя (с выхода тахогенератора); б, г - по оценкам скорости двигателя и упругого момента, вырабатываемым AMP НИЯ масс равен 3,2. В обоих каналах для обеспечения труемых значений добротности введена динамическая обратная связь по скорости (или оценке скорости) двигателя, представляющая собой сочетание жесткой отрицательной обратной связи по скорости или ее [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [ 92 ] [93] [94] 0.0117 |