
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] движение к экстремуму критерия качества без нарушения режимов нормального функционирования оптимизируемой системы управления; автоматическое поддержание равенства статических коэффициентов передачи замкнутой реальной системы и эталонной модели; соблюдение одинаковых условий функционирования настраиваемой системы при оценке значений функционала в различных точках пространства варьируемых параметров. Учитывая сложность алгоритмов оптимизации, в частности алгоритма деформированного многогранника, и систем модального управления с наблюдающим устройством, для выполнения условия нормального функционирования микропроцессорных систем управления в ходе автоматизированной настройки целесообразно задачу автоматизации настройки разделить на две задачи с разными приоритетными уровнями. Алгоритм задачи верхнего уровня (оперативная задача) включает в себя вычисление управляющего воздействия, расчет эталонного движения, определение значения функционала при конкретных значениях варьируемых параметров, счет текущего времени в пределах длительности переходного процесса Т. Этот объем вычислений выполняется на каждом такте, когда процессор получает сигнал прерывания от таймера. Остающиеся после оперативной задачи временные паузы до поступления очередных сигналов прерывания используются для решения задачи нижнего уровня (фоновой задачи). Основным ее назначением является расчет оптимизируемых коэ4х})ициентов. Другая функция фоновой задачи состоит в обеспечении равенства статических коэффициентов замкнутой реальной системы и эталонной модели. Для ее реализации входное воздействие на реальную систему масштабируется в каждой точке пространства параметров. Динамические свойства реальных систем управления электромеханическими объектами часто зависят от направления движения. Поэтому оценивать значения критерия качества целесообразно при отработке системой управляющих воздействий одной полярности. Следовательно, в каждой точке пространства параметров фоновая задача должна организовать два интервала движения системы длительностью Т каждый. Разделение функций между оперативной и фоновой задачами на каждом интергвале поясняется на рис. 4.П. ГЛАВА ПЯТАЯ ИССЛЕДОВАНИЕ ДИНАМИКИ И ОПТИМИЗАЦИЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ КРУПНОГО РАДИОТЕЛЕСКОПА 5.1. Крупный радиотелескоп как объект управления. Математическое описание Крупные радиотелескопы (РТ) с параболическим зеркалом, используемые для радиоастрономических исследований и космической связи, представляют собой сложные инженерные сооружения. Главное зеркало У (рис. 5.1), диаметр которого может достигать десятков метров, монтируется на опорно-поворотном устройстве 2. Уравновешивание его обеспечивается с помощью противовеса 3. Направление на заданную точку космического пространства обеспечивается в результате совместной работы азимутального и уг-ломестного приводов, первый из которых обеспечивает поворот опорно-поворотного устройства на катках 5 вокруг вертикальной оси, а второй - поворот зеркальной части относительно горизонтальной (угломестной) оси. В настоящей главе рассматривается азимутальный электропривод, включающий в себя редукторы 4 и двигатели Ml и М2, получающие питание от реверсивных тири-сторных преобразователей с согласованным совместным управлением TfJt и ТП2. Одним из условий получения высокой точности работы следящих электроприводов является возможно более полное исключение влияния зазоров в кинематических цепях на их работу. В тех случаях, когда электропривод РТ выполнен как двух- или многодвигательный, для устранения влияния зазора применяются электромеханические устройства выборки зазора, реализующие возможность создания тормозного мрмента одним из двигателей, в то время как второй создает двигательный момент. Такое устройство структурно показано на рис. 5.1. В установившемся режиме на входы токовых контуров с регуляторами тока РТ! и РТ2 через блоки ограничения Б01 и Б02 кроме напряжения регулятора скорости Ыр.с с разными знаками подается напряжение «б.к с выхода устройства выборки зазора, включающего в себя последовательно соединенные блок выделения модуля БВМ и блок нелинейности ВН. Благодаря такому их включению зависимость «б.к = / («р.с) имеет вид, показанный на рис. 5.2. Напряжения, задающие токи двигателей, равны: Ыз,т1 = Ыр.с + «б.к; «з. т з = "р.с - «б.к. Изменяя в результате воздействия на БН значение напряжения «е.к (см. рис. 5.1), можно менять зависимость M„i/Mc.h = / (ыр.с /i1p.c.«) и МдаШса = / (up.JUp.cB), где i/p.cH - напряжение на выходе регулятора скорости PC, соответствующее номинальному мо- 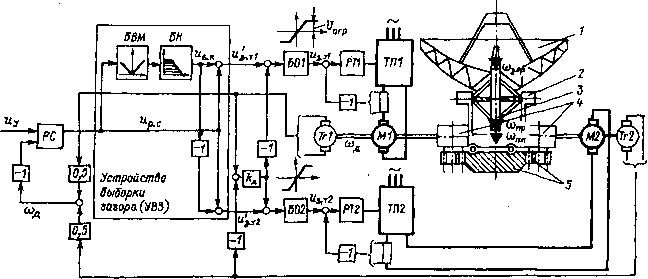 Рис. 5.1. Функциональная схема скоростной подсистемы электропривода крупного радиотелескопа [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0107 |