
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [ 55 ] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 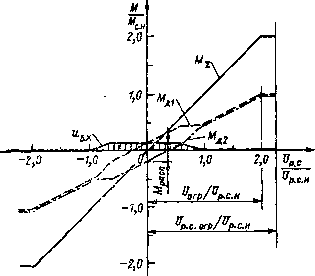 Рис. 5.2. Статические характеристики устройства выборки зазора менту нагрузки Мс.и, Мд и Мдг - моменты двигателей, создающие в сумме момент Ms- Пока нагрузка на ИО такова, что Ир.с < «р.с.1, зазор не раскрывается, что обеспечивает линеаризацию объекта. Когда в динамических режимах напряжение на выходе PC превышает номинальное значение {UpJUpc.n > 1), напряжение Нб.к равно нулю, и схема работает так же, как без устройства выборки зазора. Ограничение динамического момента (на рис. 5.2 показано ограничение на уровне 2Мс.н) выполняется устройством выборки зазора. Блоки Б01 и 502 обеспечивают ограничение тока якоря двигателей в нештатных режимах. Для устранения противофазных колебаний двигателей предусмотрена введенная на токовые контуры связь по разности их скоростей с коэффициентом д. Поскольку связь двигателей с опорно-поворотным устройством осуществляется через редукторы, передаточное число которых составляет десятки тысяч, момент инерции поворотной части, приведенный к двигателю, обычно значительно меньше момента инерции двигателя и редуктора. Поэтому существует возможность настройки контура скорости практически так же, как в жесткой систе.ме. Однако, как отмечалось в гл. 2, колебания исполнительного органа - зеркальной части - электроприводом при этом практически демпфироваться не будут. Одна из задач разработки АСУ ЭП наведения состоит в обеспечении плавного движения зеркала в результате создания требуе- мого закона управления скоростью двигателей. При проектировании электропривода разработчик располагает математическим описанием объекта в виде многомассовой упруговязкой структуры. Однако из-за исключительной сложности конструкции, фактически являющейся нелинейной системой с распределенными параметрами, и связанных с этим трудностей расчета, описание, как правило, должно уточняться в процессе натурных испытаний и опытной эксплуатации РТ. Поэто.му исследователь должен решить задачу разработки математической модели объекта, в которой реальная конструкция заменена эквивалентной по взаимодействию с АСУ ЭП системой с сосредоточенными массами и упруговязкими звеньями, претерпевающими деформацию скручивания. По классификации, принятой в работе [37], рассматриваемая установка может быть отнесена к числу непрерывных стационарных объектов, так как при каждом данном положении по углу места параметры ИО остаются неизменными. Взаимного влияния азимутального и угломестного приводов почти нет. Если эксперимент по идентификации производится в безветренную погоду, то изменение момента нагрузки пренебрежимо мало и электромеханическая система может быть отнесена к системам с одним входом. Эта же предпосылка позволяет использовать методы идентификации детерминированных систем, так как случайный характер процессов связан, в первую очередь, именно со случайным характером ветровой нагрузки. Чтобы иметь воз.можность идентифицировать радиотелескоп как сложную упруговязкую электромеханическую систему на основе экспериментальных ЛЧХ, необходимо в процессе снятия характеристик исключить влияние основных нелинейностей. Влияние зазора в редукторах и коренном зацеплении исключается с помощью устройства выборки зазора, влияние сухого трения - в результате того, что эксперименты по снятию ЛЧХ производятся при движении установки, причем амплитуда гармонических колебаний скорости не превышает ее среднего значения. Кроме того, уровень входных сигналов выбирается таким, что якорный ток не достигает предельного допустимого значения. В процессе снятия логарифмических частотных характеристик система была замкнута через регулятор скорости PC по полусумме напряжений тахогенераторов Тг1 и Тг2 (см. рис. 5.1). Использование штатной ЭВМ (см. § 4.1) позволило одновременно определить ЛЧХ, связывающие выходные сигналы тахогенератора (сод) и гироскопических датчиков угловых скоростей платформы опорно-поворотного устройства (сопл), противовеса (сопр) и зеркала (шэер) с сигналом на входе замкнутого контура регулирования скорости Ыу. Места установки датчиков угловых скоростей помечены знаком Т- На рис. 5.3 представлен комплект ЛАЧХ, характеризующих связь скоростей платформы, зеркала и противовеса со скоростью ABUm. 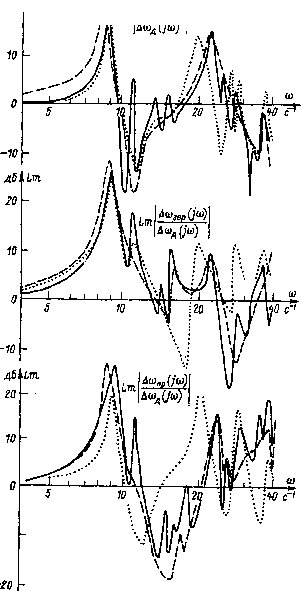 Рис. 5.3. Экспериментальные ЛЧХ радиотелескопа как упруговязкого механизма (----Р = 10°,--Р = 45°, . . . - Р = 90°) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [ 55 ] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0129 |