
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [ 21 ] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] упругой полосы в результате воздействия на вход звена \1{Тср) сигнала кРуЩ. При линеаризации нелинейная часть НДС (обведенная штриховой линией на рис. 2.4, б) приводится к обычному апериодическому звену (рнс. 2.4, в). Параметрами этого звена, учитывающими связь между установившимися значениями переменных в рассматриваемом режиме и базовые значения соответствующих переменных, являются постоянная времени натяжения Тр и коэффициент передачи kp: г b / CpVf, Тр i нач «нач у. б с Наличие упругих звеньев приводит к значительному.усложнению объекта автоматической системы регулирования по сравнению с объектом, где упругостью можно пренебречь. При больших коэффициентах соотношения масс у упругость существенно влияет на характер изменения скорости двигателя и тока якоря. В этом случае реализация принятых в жесткой системе стандартных настроек контуров обычно оказывается невозможной. Тогда приходится идти либо ка значительное снижение коэффициентов усиления, либо искать способы настройки, обеспечивающие достаточные запасы устойчивости контуров при удовлетворительном быстродействии. При близких к единице значениях у объекты контуров тока и скорости не отличаются от таковых в жесткой системе и их стандартные настройки могут быть реализованы. Однако при этом электропривод с системой управления не оказывает заметного демпфирующего влияния на колебания ИО, которые затухают только под действием сил трения. Обычно это недопустимо, поэтому и в этом случае может оказаться необходимым изменить настройку регуляторов или структуру системы. 2.2. Система управления скоростью при упругой связи двигателя с исполнительным органом. Оценка влияния упругости При достаточно большом многообразии систем управления скоростью можно выделить как основные схемные решения одноконтурную систему, в которой при наличии главной обратной связи по скорости задача ограничения якорного тока решается путем применения упреждающего токоограничения, и систему с подчиненным токовым контуром, которую можно рассматривать как унифицированную. Нормированная детализированная структурная схема одноконтурной системы приведена на рис. 2.5, а. Предполагается, что питание двигателя осуществляется от полупроводникового преобразователя, который с достаточной степенью приближения может быть охарактеризован малой постоянной времени Гт. п- Второй малой 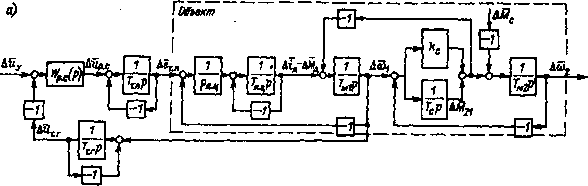 Обьбкт контура скорости Рис. 2.5. Структурная схема одноконтурной системы регулирования скорости: а - детализированная; б - преобразованная
Рис. 2.6. К оценке возможности пренебрежения упругостью в одноконтурной системе ПОСТОЯННОЙ Времени является постоянная времени фильтра тахогенератора Тх.т- Не рассматривая реакцию на возмущение (АМс =0), структурную схему объекта (рис. 2.5, б) можно получить на основании схемы на рис. 2.3. Передаточная функция объекта контура скорости может быть представлена в виде Дш1(р) 1 в-Чр) Авт. п (Р) 1 + в (Р) 1 -f В-1 (р) В{р) = Тэ«р (Г я. цР+1) Ух (Р) «2 (Р) (2.12) 7эм = Ря. цТм-электромеханическая постоянная времени. Вид логарифмической амплитудной частотной характеристики (ЛАЧХ) объекта контура скорости для некоторого конкретного соотношения параметров Тэы > Гя T„, ц>д/т у> У 1 показан на рис. 2.6. Величина 20 Ig (/со) пои а = Т- V характеризует удаление резонансного всплеска Lm Woi (/w) I от оси абсцисс. При замыкании системы по скорости двигателя влияние упругости будет мало проявляться в скорости, если передаточная функция регулятора Wp. с (р) будет выбрана так, что резойансный всплеск ЛАЧХ разомкнутой системы с передаточной функцией Wip)Wp.c{p)- Worn (р) (Гт. пР+1) (Гт. гР+1) будет располагаться хотя бы на 6 дБ ниже оси абсцисс, что соответствует показателю колебательности М = 1 [10]. Остановимся подробнее на рассмотрении унифицированной системы, известные достоинства которой привели к ее широкому распространению в различных отраслях техники. Соответствую- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [ 21 ] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0135 |