
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] !Сарактер изменения скорости ИО при управлении полностью оп-;}еделяется распределением корней характеристического уравне-йия Я (р) = О, три из которых могут выбираться желаемым обра-JOM благодаря наличию трех связей по координатам: Хд - Acoi; % = ДМ21 и = Дсог, а два являются неуправляемыми. Будем гак выбирать значения коэффициентов регуляторов, чтобы выполнялось равенство Н{р) = Н{р) при Н\р) = Н\{р)Н2{р), ГЯ fA (р) == р + аЫор + аыор + coq - полином, все корни которого могут быть распределены желаемым образом: Hip) ~ = р* + Ьыр + 0) - полином, обусловленный наличием контура тока с эквивалентной малой постоянной времени Гэ, корни которого неуправляемы и не должны существенно влиять на вид переходного процесса. Коэффициенты а, определяют характер распределения управляемых корней (полюсов) системы, а средне-гйэметрический корень Шо характеризует ее быстродействие. Модуль сопряженных комплексных неуправляемых корней со и ко-фициент определяют их положение на плоскости корней в зависимости от параметров системы и выбранного расположения управляемых, корней. Введя переменную р* = р/й)„ и обозначив Ту соо = Ту; Т»&о = т„; Гэ сйо = V можно записать соответствующие с}юр-мулам (2.19) передаточные функции в нормированном виде: F„i3(p*)=Aai(p)Mjry(p) = (YT?pf+l)/Q(p);J .г!) Ш23 (Р*) = (Р*)/Д«у (р*) = 1/Q (р*), где полином знаменателя имеет вид а характеристический полином я(р.)=р!+р:+Г-+-4-)р!+ + 2 11 (2.22) Предлагается выбрать для трех управляемых корней распреде-деиие Баттерворта [581, которое в системе второго порядка при- Заказ J« 398 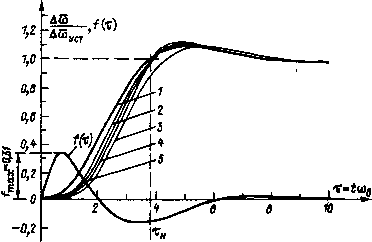 Рис. 2.11. К определению характера изменения скорости в системе, замкнутой по вектору состояния механизма /-Tjj3=0; 2-Tjj3=0,3; Ту=1,8; 3-Тцз=0,4; Ту=1,8; 4-xj=0.5; Ту=0,75; 5-х=0,6: = 0,57 ВОДИТ к настройке на оптимум по модулю, а в системе третьего порядка (при ai~ = 2) обеспечивает отработку ступенчатого управляющего воздействия с перерегулированием около 8 % при первом достижении установивщегося значения Тн = LiHo = 3,8. На рис. 2.11 соответствующая зависимость (т)/Дй)уст показана жирной линией 1. Приравнивая друг другу правые части характеристического полинома Я (pgf) и полинома, определяющего желаемый характер распределения корней я" (р*) = {р1 + 2р1 + 2р, + 1) (pf + bip. + со!), (2-23) где со = coi/cop, можно получить формулы для коЭ({)фициентов регулятора в виде: ai (Ту, Tpis); (2ту-1)а2(Ту; тэ); (2.24) =ТмТуаз (Ту; хэ)-ki, где зависящие от Ту и т коэффициенты равны «1 (Ту; тз) = 1 + тэ + 0,25 -тз (1 + ; стремятся к единице при tjs0. При этом неуправляемые корни характеризуются зависимостями W - i--1; o,!=2f-i + -J---L +lY цэ V З-у дэ \э J На рис. 2.12 показана верхняя полуплоскость плоскости нормированных корней, на которой отмечены вещественный и один комплексно-сопряженный управляемые корни (pi и ра)- Вещественная часть неуправляемого корня biCo/2 однозначно определяется значением гз, что позволяет провести на плоскости корней вертикальные линии, соответствующие значениям гз. Тонкими сплошными или штриховыми линиями показаны годографы неуправляемых корней при разных значениях Ту в зависимости от Tjja. Для того чтобы наличие неуправляемых корней не приводило , к увеличению длительности переходного процесса и перерегулирования более чем на 10-15 %, надо потребовать, чтобы неуправляемые корни располагались вне окружности с радиусом R = 2. Кроме того, надо, чтобы степень устойчивости [82] определялась управляемыми корнями, что выполняется, если bico/2>0,5 или т,0 < 0,67. На рис. 2.12 принято за максимальное значение тэ = = 0,6. Таким образом, разрешенная область расположения неуправляемых корней первоначально ограничена справа линией абвд. Изложенный подход к синтезу регулятора базируется на представлении о возможности замены ряда малых постоянных времени одной эквивалентной суммарной постоянной времени тэ, благодаря чему передаточная функция W (р) имеет вид (2.21). При той же степени идеализации передаточная функция жесткой замкнутой унифицированной системы регулирования скорости с подчиненным токовым контуром запишется как W{p)==P--------- йр. с \ 2 / Если в частном случае Ту = V 22, то при расчете надо подставлять цифры после умножения (2Ту-1)/т„2 на aj (Ту; тэ). б* 83 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [ 26 ] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0126 |