
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [ 35 ] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] И1-П
Матрица выходного сигнала есть Си = П ООО). Наблюдатель включает в себя четыре интегратора. Коэффициенты наблюдателя, определяющие его динамику, находятся из выражения для, определителя матрицы P«-(ii-n-LC„) 21" /31 /41 Т„1 Р 1 имеющего вид Я„ (р)-р* + /„р + м2 / VcT„2 Выбирая для распределения корней наблюдателя стандартную форму Баттерворта 4-го порядка Hi ip) = р + 2,6шо«р + 3,4o)Lp + 2,6шо„р -f шон. можно получить выражения для коэффициентов наблюдателя /и = 2,6шон -3,4o)i /з1 = 2,6шон -(©ОнУТу - 1); 1ц = 0>OhTiuTT„2- При отработке управляющего воздействия, когда наблюдатель восстанавливает координаты системы без ошибки, соблюдается равенство = Oj. Сигнал на входе интегратора, моделирующего нагрузку, в течение всего переходного процесса равен нулю, и процесс в системе с наблюдателем протекает также, как в системе, замкнутой по непосредственно измеренным координатам. При изменении момента нагрузки равенство = нарушается и сигнал Afc поступает на вход интегратора 1/{7„2/э). Вид переходного процесса будет зависеть от параметров системы iji быстродействия наблюдателя. Этот переходный процесс может быть оценен в результате рассмотрения матричного уравнения системы, включающей в себя объект, токовый контур, наблюдатель и обратные связи. В установившемся режиме соблюдается равенство Мс = Мс. Наблюдатель, управляемый скоростью двигателя с выделением ошибки по скорости исполнительного органа. Когда существует йозможность, кроме скорости двигателя, измерить скорость исполнительного органа и необходимо восстановить только упругий момент, можно использовать а>2 для выделения ошибки восстановления. Наиболее простое решение получается, если в качестве сигнала управления использовать скорость двигателя, приняв в схеме . на рис. 2.21
Aii-i = Ац-п - Bmll-
Для двухмассового объекта наблюдатель, не восстанавливающий момент нагрузки, имеет второй порядок. Его структурная схема представлена на рис. 2.23. Для определения коэффициентов li, должен быть использован характеристический полином Нн (р) = TuiV + IJoTuip + (1 + IJc)- Наблюдатель предельно прост. Использование в качестве управляющего воздействия скорости двигателя создает практическое удобство настройки, состоящее в том, что она может проводиться поэтапно: сначала настраивается модель, затем система, замкнутая через модель, и только после этого вводятся и подстраиваются связи наблюдателя. При использовании наблюдателя, управляемого током, это затруднительно, так как характеристическое уравнение, лежащее в ос- 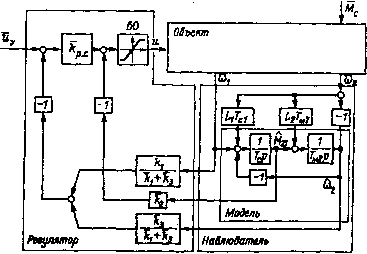 Рис. 2.23. Система, замкнутая через наблюдатель, управляемый скоростью двигателя [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [ 35 ] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0117 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||