
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [ 93 ] [94] 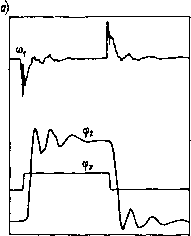 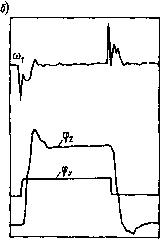 Рис. 8.15. Реакция следящей системы на прямоугольное задающее воздействие с амплитудой ± 0,4°. Введены обратные связи: а - по скорости двигателя (с тахогенератора); б - по оценкам скорости двигателя и упругого момента оценке, вырабатываемой AMP, и положительной обратной связи, вводимой через фильтр первого порядка. Исследования показали, что применение AMP в первом канале позволяет без использования тахогенератора получить такое же качество переходных процессов и такую же точность отработки входных воздействий, что и в системе с тахогенератором. Одновременно удалось расширить полосу пропускания следящей системы с 14 до 19 Гц, что составляет 0,89 частоты механического резонанса. В следящей системе второго канала зазор не выбран, а трение на валу механизма мало, в результате чего электромеханическая система по своим свойствам приближается к системе с так называемым люфтом без потерь, или инерционным люфтом. В такой системе при определенных уровнях добротности начинают возникать автоколебания, наиболее явно проявляющиеся в появлении пульсаций сигнала ошибки по положению (рис. 8.14 и 8.15). Применение AMP в этом канале приводит к уменьшению амплитуды пульсаций (при воспроизведении гармонического и треугольного воздействий) по сравнению с системой с тахогенератором в 1,5-2 раза при одинаковых значениях добротности в сравниваемых системах или, при намеренном снижении добротности следящей системы, к их полному устранению. При этом размах колебаний вала механизма в системе с AMP меньше ширины зазора. Применение регулятора позволило также обеспечить более высокое качество переходных процессов (при одинаковой добротности) по сравнению с исходной системой (рис. 8.15). Обобщая результаты экспериментальных исследований адаптивно-модального регулятора пониженного порядка в составе различных следящих систем с бесконтактным моментным приводом, заключаем, что применение этого регулятора позволяет, обходясь без использования тахогенератора, обеспечить высокие характеристики функционирования следящих систем с упругими связями, а именНо: обеспечить требуемый характер переходных процессов в следящей системе при отработке типовых входных воздействий за счет устранения возникающих в системе упругих электромеханических колебаний; существенно повысить быстродействие следящей системы и расширить ее полосу пропускания до значений, вплотную приближающихся к низшей частоте механического резонанса; обеспечить уменьшение амплитуды или полное устранение нелинейных колебаний, обусловленных наличием зазора в кинематической передаче, а также повысить точность слежения такой системы. Одновременно, благодаря наличию у системы с Ал1Р адаптивных свойств, обеспечивается стабильность динамических характеристик следящей системы при изменении ее параметров. Все это наиболее полно соответствует требованиям, предъявляемым к современным следящим системам. СПИСОК ЛИТЕРАТУРЫ 1. Авиационные моментвые двнгатели/Л. Н. Столов, Б. Н. Зыков, А. Ю. Афанасьев, Ш. С. Галеев.-М.: Машиностроение, 1979. 2. Андреев Ю. Н. Управление конечномерными линейными объектами.- М.: Наука, 1976. 3. А. с. 798712 (СССР), МКИ G05 В17/02. Система управ-ления/Ю. А. Борцов, Н. Д. Поляхов, И. А. Приходько, В. В. ПутовЛОткры-тия. Изобретения. 1981. № 3. 4. А. с. 941923 (СССР), МКИ G05 В11/01. Система управ-ления/Ю. А. Борцов, И. Д. Поляхов, В. В. Путов и др. Открытия. Изобретения. 1982. № 25. 5. А. с. 1275728, МКИ Н02Р5/16. Устройство для определения частоты вращения электродвигателя постоянного тока/Д. Б. Изосимов, И. Е. Ко-стылева, В. И. Уткин, А. Б. Шустов и др. Открытия. Изобретения. 1986, № 45. 6. А. с. № 1510060, МКИ Н02Р6/02. Вентильный электро-привод/Н. С. Благодарный, Ю. А. Борцов, В. Б. Второв и др. Открытия. Изобретения. 1989. № 35. 7. Башарин А. В., Новиков В. А., Соколовский Г. Г. Управление электроприводами.- Л.: Энергоиздат, 1982. 8. Беленький Ю. М., Зеленков Г. С, Микеров А. Г. Опыт разработки и применения бесконтактных моментных приводов.- Л.: ЛДНТП, 1987. 9. Беленький Ю. М., Мнкеров А. Г. Выбор и программирование параметров бесконтактного моментного привода.- Л.: ЛДНТП, 1990. 10. Бесекерский В. А., Попов Е. П, Теория систем автоматического регулирования.- М.: Наука, 1972. 11. Благодарный Н. С, Второв В. Б., Скибицкий И. Н. Система автоматического управления бесконтактным моментным приводом Известия ЛЭТИ: Сборник. Вып. 404.-Л., 1988, 12. Благодарный Н. С, Поляхов Н. Д., Томчина О. П. Адаптивное управление прецизионными следящими системами с бесконтактным моментным двигателем постоянного тока Известия ЛЭТИ: Сборник, Вып. 384.- Л.: 1987. 13. Бленд Д. Нелинейная динамическая теория упругости. - М.: Мир, 1972. 14. Борцов Ю. А. Адаптивные электроприводы и следящие снстемы При-воды.- Л.: Машиностроение, 1990. 15. Борцов Ю. А. Математические модели автоматических систем.- Л.: ЛЭТИ, 1981. 16. Борцов Ю. А., Бычков А. И. Обобщенные оценки влияния упругих звеньев на динамику электроприводов и настройку регуляторов унифицированных систем Электропро.мышленность. Сер. Электропривод. - 1973, № 7 (2 4). 17. Борцов Ю. А., Второв В. Б., Голик С. Е. Адаптивные алгоритмы для микропроцессорных систем управления электромеханическими объектами Электромашиностроение и электрооборудование. - Киев, 1982. Вып. 35. 18. Борцов Ю. А., Поляков Н. Д. Применение стационарных динамических наблюдателей в адаптивных электромеханических системах с эталонной моделью Автоматизация производства. - Л.: Изд-во ЛГУ, 1987. Вып. 3. 19. Борцов Ю. А., Поляхов Н. Д., Путов В. В. Электромеханические системы с адаптивным и модальным управлением.- Л.: Энергоатомиздат, 1984. 20. Борцов Ю. А., Путов В. В. Исследование автоколебаний нелинейной унифицированной САРС с упругой механической связью Известия ЛЭТИ.- 1974.- Вып. 151. 21. Борцов Ю. А. Совершенствование систем электропривода на основе микроэлектронной техники Электротехника.- 1984.- № 7, 22. Борцов Ю. А., Соколовский Г. Г. Тиристорные системы электропривода с упругими связями,- Л.: Энергия, 1979. 23. Борцов Ю. А., Суворов Г. В. Методы исследования динамики сложных систем электропривода.- М.; Л.: Энергия, 1966. 24. Борцов Ю. А., Суворов Г. В., Шестаков Ю. С. Экспериментальное определение параметров и частотных характеристик автоматизированных электроприводов.- Л.: Энергия, 1969. 25. Борцов Ю. А., Шестаков В. М, Исследование динамики систем подчиненного регулирования с упругими механическими передачами Электро-промышленность. Сер. Электропривод.- 1972.- № 5 (14). 26. Борцов Ю. А., Юигер И. Б. Автоматические системы с разрывным управлением.- Л.: Энергоатомиздат, 1986. 27. Бродовский В. Н., Каршавов Б. Н., Рыбкин Ю. П. Бесколлекторные тахогенераторы постоянного тока/Под ред. В. Н. Бродовского.- М.: Энер-гоиздат, 1982. 28. Бургин Б. Ш., Фоттлер Ф. К. Исследование необходимости учета упругих связей в системах подчиненного регулирования Электропромыш-ленность. Сер. Электропривод.- 1972.- № 2 {!!). 29. Вейц В. Л., Кочура А. Е., Мартыненко А. И. Динамические расчеты приводов машин.- Л.: Машиностроение, 1971. 30. Влияние упругости и зазоров в механических передачах на динамику секционного электропривода быстроходной бумагоделательной машины/В. Д. Барышников, Ю. А. Борцов, В. М. Шестаков и др. Электропромышленность. Сер. Электропривод.- 1971. - № 9. 31. Воронов А. А. Устойчивость, управляемость, наблюдаемость.- М.: Наука, 1979. 32. Время импульсные вычислительные устройства/Под ред. В. Б. Смо-лова, Е. А. Угрюмова.- М.: Радио и свяэ(ь, 1983. 33. Второв В. Б. Применение метода инверсии для построения матема- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [ 93 ] [94] 0.0148 |