
|
|
|
Главная страница Упругие связи [0] [1] [2] [ 3 ] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] эффициент усиления PC становится равным нулю, т. е. контур регулирования скорости размыкается. Следующий этап пуска происходит при постоянном напряжении ограничения на выходе PC Ир.с = огр = const. Выходное напряжение PC является эталонным напряжением для контура регулирования тока (токовый контур «подчинен» контуру скорости). Поэтому регулятор тока РТ поддерживает постоянство тоца якоря =/ятах, воздействуя на систему управления тиристорного преобразования ТП. При постоянстве момента нагрузки это соответствует разгону двигателя с постоянным ускорением. В этот период пуска для входных цепей регулятора тока можно записать огр Д. т max q где /д.тп1ах = д,т/я шах; /я max - максимальный ДОПУСТИМЫЙ ТОК при пуске (и в переходных режимах); д.т - передаточный коэффициент датчика тока, В/А; Яз,т и Rj - входные сопротивления РТ соответственно по каналу задания и по каналу обратной связи по току. По мере разгона двигателя напряжение тахогенератора ТГ растет и, когда оно достигнет значения, близкого к определяемому равенством Uy тг Rb. с Rc регулятор скорости выйдет из ограничения; напряжение на его .выходе начнет у.меньшаться, давая сигнал на уменьшение тока якоря. Установившееся положение, к которому придет система, будет характеризоваться тем, что при данной нагрузке двигателя результирующий входной сигнал PC обеспечит на его выходе такое напряжение Ир.с, которое соответствует данному току нагрузки. Система во всех режимах будет ограничивать якорный ток значением /я max, которое можст быть превышсно только в первый момент ограничения PC в результате переходного процесса в токовом контуре. Таким образом, первая задача токового контура состоит в ограничении значения якорного тока, что особенно важно при применении тиристорного преобразователя. Вторая задача токового контура сводится к быстрой отработке возмущающего воздействия в виде изменения напряжения сети. Если напряжение сети изменится скачком, то также скачком изменится в первый момент и напряжение на выходе тиристорного преобразователя ТП. Это приведет к изменению якорного тока. Регулятор тока будет восстанавливать его в результате изменения угла регулирования тиристоров. Если быстродействие токового контура велико, а электромеханическая постоянная времени привода значительна, то отклонение скорости в переходном процессе будет малым [7, 47]. Рассматривая принципы оптимизации автоматической системы управления, будем считать, что входные воздействия на систему достаточно малы, благодаря чему выходное напряжение регулятора скорости, а следовательно, и ток якоря не ограничиваются. Для системы преобразователь -- двигатель, управляемый напряжением (ТП-Д), могут быть записаны уравнения в приращениях: Дет. п = Д1яЯя. ц (Тя. цр+ 1) + СдД©; СдД1я - ДМс = JpA(i>, где Яялх, Т„, - сопротивление и электромагнитная постоянная времени якорной цепи преобразователь - двигатель; Сд - коэффициент в системе СИ, связывающий при постоянном потоке возбуждения ЭДС двигателя с угловой скоростью или электромагнитный момент с якорным током; ДуИс -приращение момента нагрузки. При отсутствии возмущающего воздействия в виде изменения напряжения сети, считая, что на вход ТП действует выходное напряжение регулятора тока «р.т, запишем Дбт. п = Wr. п (р) А«р. т, обозначая через Wj.n (р) передаточную функцию линеаризованного преобразователя при управляющем воздействии. На основании этих уравнений построена структурная схема объекта (рис. 1.5, а). Передаточные функции регуляторов тока и скорости обозначены соответственно Фр.т (р) и Wp.c (р), а датчика тока и тахогенератора - U/д.т (р) и Wt.t (р). Коэффициенты Rt/Rst и RjRs.c учитывают различие передаточных коэффициентов регуляторов по прямому каналу и каналу обратной связи. Структурная схема токового контура может быть преобразована после вынесения возмущающего воздействия АМс на его вход (рис. 1.5, б). Передаточная функция внутреннего контура, образовавшегося в результате переноса обратной связи по ЭДС двигателя с передаточным коэффициентом Сд на выход контура тока, записывается в виде R«. ц (Г„. цР + 1) ( 1 + А (п) = ГзмР (Тя. U.P+ 1) ГэмР (Гя. цР + 1) + 1 Тзм ~ JRn.n./c\ - электромеханическая постоянная времени при- вода. Тогда передаточная функция разомкнутого токового контура / ip) = ttp. X (р) . (р) Гд. т (р) А ip). "я. ц 1 я. цР "Г 1) Aufx  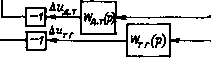 «г Dip ?"«..цР+ • wrrm.r(v) г Рис. 1.5. Структурная схема унифицированной системы регулирования скорости (а) и преобразованный токовый контур (б) [0] [1] [2] [ 3 ] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0114 |