
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [ 70 ] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] измерителя момента на операционном усилителе или при косвенном измерении производной упругого момента через разность скоростей двигателя и тормозного генератора. Из структурной схемы (см. рис. 6.4) следует, что Au)i -А(02 = АМу -- . т. е. разность скоростей эквивалентна производной упругого момента, измеренной с запаздыванием. Чем меньше внутреннее демпфирование в механической части Td, тем точнее разность скоростей воспроизводит производную упругого момента. В рассматриваемой системе Та ==0,74-10" с, поэтому погрешность такого способа реализации измерения производной невелика. Достоинством косвенного способа является то, что нет необходимости осуществлять дифференцирование сигнала измерителя момента. Система регулирования скорости. Контур регулирования тока якоря двигателя может настраиваться так же, как в жесткой системе, так как влиянием на него упругости можно пренебречь. Контур регулирования скорости в соответствии со структурной схемой на рис. 6.5, а и при принятых упрощениях содержит объект регулирования с передаточной функцией где Wiip) и Wip) определяются выражениями (2.10). В настоящее время к быстродействию АСР скорости не предъявляется высоких требований, а для уменьшения взаимодействия между системами регулирования скорости и момента может оказаться нецелесообразным повышать его. При значениях у, близких к единице, Влияние упругости на объект регулирования локальной АСР скорости становится несущественным. Поэтому настройка локальной АСР скорости, если интересоваться только координатой ш, может быть выполнена, как в жесткой системе. Это приемлемо в том случае, если АСР скорости работает в режиме стабилизации. Если программа испытаний предусматривает изменение как момента, так и скорости вращения, то такая настройка не может быть применена, так как при воздействии на вход АСР скорости изменения AcOj имеют сильно колебательный характер, а отклонение величины упругого момента АЖу от установившегося значения велико. Для исключения этого явления необходимо в 5-10 раз снизить значение коэффициента усиления регулятора скорости по сравнению с настройкой на ОМ. До сих пор при рассмотрении настроек регуляторов взаимное влияние АСР скорости и момента не принималось во внимание. Однако оно существует и должно быть оценено. Наиболее существенными проявлениями этого влияния являются: 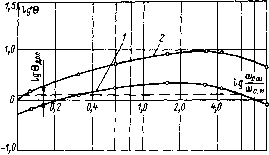 Рис. 6,7. Зависимость функции взаимосвязи от соотношения частот среза контуров скорости и момента а) изменение передаточных функций, и частотных характеристик данной локальной системы в результате взаимодействия со второй системой. Анализ был произведен с помощью частотного критерия взаимосвязи. Было установлено и затем подтверждено моделированием на АВМ, что взаимодействие в этом смысле является слабым и настройки, полученные без его учета, практически не подлежат корректировке; б) отклонение от заданного значения выходной величины данной АСР при подаче сигнала на вход другой системы. Это проявление взаимосвязи может быть весьма значительным, несмотря на слабую взаимосвязь по п. «а». Допустимая взаимосвязь в этом смысле определяется требованиями технологии и не должна превышать некоторой величины. Оценку в этом случае целесообразно осуществлять с помощью ин- 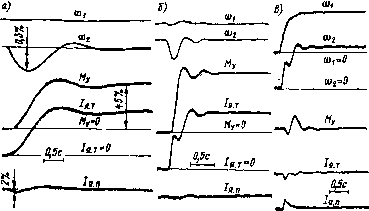 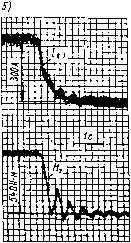 Рис. на действующем ИСМТ тегрального критерия. На рис. 6.7 показаны рассчитанные на АВМ кривые, характеризующие изменение функции взаимосвязи 9 в зависимости от частот среза локальных систем при Pi = Рг = 0>5. При этом частота среза АСР момента была постоянной и равной ©см = 5 c~, а изменялась частота среза АСР скорости ©сш- Из кривых следует, что взаимосвязь уменьшается при значительной разнице частот среза локальных систем. Интересно, что максимум взаимосвязи наблюдается не при ©с, == ©см, а при ©с, = (2 -т- 3) ©см , т. е. оценка слабости связей по условию различия частот среза оказывается несправедливой при © > ©см и справедливой при ©си < ©см- Кривая / соответствует ИСМТ, где АСР момента выполнена с коррекцией по производной от My, а кривая 2 - без коррекции. Кривая / отражает меньшую степень взаимосвязи по сравнению с кривой 2, что объясняется увеличением быстродействия АСР момента при введении коррекции и соответственно уменьшением интегральной ошибки по моменту при воздействии на вход АСР скорости. Но и в этом случае взаимосвязь является недопустимой и необходимо на порядок снизить значение Рр.с по сравнению со стандартной настройкой. На рис. 6.8 приведены некоторые результаты моделирования переходных процессов в автоматизированном электроприводе ИСМТ на АВМ. Максимальное быстродействие системы регулирования момента, достигнутое в системе без коррекции при настройке РТ2 и РМ (см. рис. 6.2) по формуле (6. И), соответствует времени нарастания момента около 1 с, что не отвечает требованиям (рис. 6.8, а). Результат введения описанной коррекции иллюстри- 369483�532721737�52431 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [ 70 ] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0114 |