
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [ 80 ] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] Кратность изменения параметра §1 I 0,5 О 1,5 Ifi 0,5 0,3 0,6 0,9 1,2 1,5 1,0 «3  о 0,15 0,30 0,45 0,60 0,75 0,90 1,05 с 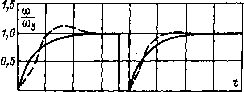 О 0,15 0,50 0,45 0,дО 0,75 0,90 1,05 С 0,01 О -Ofi1 -0,02 -0,03
0,15 0,30 0,45 0,60 0,75 0,90 1,05 с 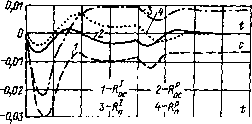 0,15 0,30 0,45 0,60 0,75 0,90 1,05 С Рис. 7.5. Переходные процессы в цифровой ЭЛ1С: £2 Л31/ SIN sin T COS -1 COST Программа адаптивного регулятора Программа перестройки привода и зСиГ ЦАП2 sp. sm Т sun, cos Т ЦАПЗ "on COST u{t) Управляющий МП J Рис. 7.6. Адаптивное микропроцессорное управление двухфазным вентильным двигателем Программная реализация алгоритмов управления в ЦВУ микропроцессорных систем электропривода делает возможным использование более сложных и эффективных законов управления, к которым, в первую очередь, можно отнести алгоритмы модального, оптимального и адаптивного управлений. В качестве примера на рис. 7.4 представлена структура МП-системы регулирования частоты вращения с прямым цифровым управлением, где реализован адаптивный закон параметрического управления. Результаты исследования системы с параметрической самонастройкой показаны на рис. 7.5. Возможность качественно улучшить основные технические характеристики электроприводов появляется при использовании тихоходных безредукторных приводов с БМДПТ. Особенностью без-редукторных приводов является высокая колебательность при больших рассогласованиях и существенная нестационарность момента инерции из-за небаланса. Достижению высоких качественных показателей бесконтактного моментного привода (БМП) с одновременной оптимизацией его технико-экономических характеристик может способствовать использование МП-управления для обеспечения адаптивных свойств не только по отношению к возмущающим факторам, но также для структурной и параметрической настройки привода, благодаря возможности использования различных схем управления и включения его элементов. При этом структурная и параметрическая перестройка привода может выполняться в процессе работы оборудования с помощью управляющего МП. Одна из возможных структур МП-системы управления БМП изображена на рис. 7.6. Особенностью системы является наличие трех контуров: внутреннего контура согласования по положению ротора синхронной машины (СМ), контура управления по регулируемой координате (положение, скорость) и контура управления схемой включения обмоток статора СМ. Такая организация управления приводом позволяет максимально использовать его потенциально высокие возможности как в результате самонастройки (параметрической или сигнальной), так и благодаря структурной адаптации. При этом применение управляющих МП в сочетании с элементами цифровой вычислительной техники позволяет значительно упростить усилительно-преобразовательное устройство (УПУ) БМП. 7.7. Взаимосвязанные системы с адаптивным управлением иа двух уровнях К настоящему времени наиболее глубоко проработана централизованная структура взаимосвязанного управления для ЭМС. Интенсивно разрабатываются процедуры построения децентрализованного управления на основе декомпозиции сложной системы на подсистемы [70, 94, 100, 103]. Наиболее удачные практические результаты при разработке децентрализованного управления получены для систем со слабыми связями, когда для удовлетворительной работы системы достаточно только локального управления (по «своим» для каждой подсистемы переменным) без учета взаимосвязей подсистем, или с учетом взаимосвязей как возмущений, но без попытки их компенсации [100]. При достаточно сильных взаимосвязях для децентрализованной структуры может возникнуть необходимость в слишком больших коэффициентах усиления с целью обеспечения качественного функционирования всей системы [94], хотя в последнее время получает новое развитие подход, [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [ 80 ] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0151 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||