
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [ 20 ] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] определить оригинал, представляющий собой зависимость ско-> рости Дсог от времени: .де kcTj{2-yJy Ту) - коэффициент демпфирования звена вто- ,pofo порядка в знаменателе передаточной функции {р)1 i(p)-При слабом механическом демпфировании (при Ъ, 1) выражение для Да)2(0 упрощается: Дша (0~ехр/ - ( v7rj ч VyTy ) V Vy Ту Таким образом, угловая частота колебаний второй массы при заторможенной первой равна \/{л/уТу), а затухание этих колебаний определяется значением la- При изменении момента двигателя движение ИО будет определяться передаточной функцией Приложив кратковременно момент к первой массе (например, подключив на короткое время двигатель к источнику питания), можно вызвать колебания всей двухмассовой системы. Считая, что изменение момента имеет характер единичной импульсной функции Л1д {t) ~ 8 {t), .можно записать
Дсо2 (0 = или при и « 1 1 -ехр I - £2 «12 1. ехр(- 6(0- Постоянную времени Гу называют постоянной вре.мени упругих колебаний двухмассовой системы. Затухание колебаний определяется коэффициентом демпфирования = kcTj{2Ty). 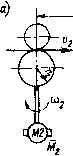 FyyCp 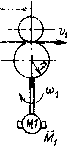 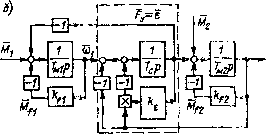 (O2 А<й/ Рис. 2.4. Двухмассовая электромеханическая снсте.ма с упругостью втор.згс рода: а - функциональная схема; б - нелинейная структурная схема; в элемент линеаризованной структурной схемы При замкнутой на источник питания якорной цепи колебани* скорости двигателя и его ЭДС вызывают колебания тока якоря и момента /Ид. Это оказывает демпфирующее воздействие на процесс колебаний в электромеханической системе. Будем называть двухмассовые электромеханические системы, в которых упругим звеном является кинематическая передача, свя зывающая двигатель с исполнительны.м органом, системами с уп ругостью первого рода. На рис. 2.4, а показана схема механизма с упругостью второго рода, в которо.м упругим элементом является транспортируемый или обрабатываемый материал (бумажное полотно, ткань, Kop.i и т. п.); Ml и М2 - двигатели первого и второго валов, которые могут работать как оба в двигательно.м, так и Ml ~ в двигательном: а М2 - в тормозном режиме. Радиусы и могут быть постоян ными, если это радиусы валов механизма, или меняться в процессе работы, если это радиусы перематываемых рулонов. Составим структурную схему такого звена при следующих допущениях: а) материал однороден и имеет по всей длине одинаковую тол щину и ширину; б) влиянием массы материала на его деформацию можно пренебречь; в) деформация имеет чисто упругий характер, причем равномерно распределяется по поперечному сечению материала; г) волновыми процессами, связанными с распределениями деформации по длине, можно пренебречь. Поведение материала на участке растяжения длиной / описывается дифференциальным уравнением [42, 91 ] - .{1 е) dt I " I где е - относительное удлинение; Vi и - линейные скорости в начале и конце участка растяжения /. Натяжение, возникающее в материале, связано с абсолютным значением растяжения А/ выражением Fy = СрД/ = Ср/е. Подставляя сюда значение е и записывая уравнения моментов для двигателей, можно получить уравнения, характеризующие рассматриваемую систему: е =-f. у> (2.11) При переходе к относительным единицам выберем следующие соотношения между базовыми величинами: Уб = V26 = b>j6ri= «262 = Уб; Mi6 = М/16 = Fy. б г; М26 = М/2б = Fy.arf, = Fy.6/(cp/). Эго позволяет непосредственно по исходной структуре перейти к НДС, параметрами которой являются постоянные времени Т, = Fy.eKcpVe); Ti = J lUiKJMio; Г„ 2 =/226/26 и безразмерные кож{)фициенты kg, = Fy.6/(СрО, kfi и kf- Постоянная времени жесткости полотна Т. численно равна вре мени, за которое натяжение изменяется от нуля до базового значения при скачкообразном увеличении разности скоростей v-Vi и условном отсутствии поступления полотна в зону деформации. Трактовка физического смысла Тс имеет характер, общий для апериодического звена, а выражение постоянной времени жесткости аналогично выражению постоянной времени любого упругого звена с поступательным движением. Нормированная детализированная структурная схема механизма приведена на рис. 2.4, б. Специфической особенностью упругого звена второго рода является характер демпфирования колебаний Заказ J* 398 j55 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [ 20 ] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0106 |