
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [ 65 ] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 6.2. Структура и методы исследования автоматиеской системы управления электроприводом ИСМТ Силовая часть электрической схемы испытательного, стенда (рис. 6.2) описывается следующими выражениями: Л12 = СтФтг„.т; Сг, п1 = СдЙ! + 1я. „Ня. п (Тя. пР + 1) + я. д/?я. д (Тя. дР + 1); я. п = я. д - я. tJ ег = Сдй! + 1я. п?я. д (Гя. дР + 1) + 1я. т (Ня. т + ?я. д) (Тя. т дР + 1); Фт = /1(1в); бт. п2 = 1в/?в (Гвр + 1), где 1я.д, гя.т, гя.п - токи двигателя, тормозного генератора и преобразователя TIIJ; /?я.д, Ня.т, Rя.п -сопротивления соответствующих участков силовой цепи; Гяд - постоянная времени якорной цепи двигателя; Тя.п - постоянная времени части якорной цепи, относящейся к преобразователю ТП1; Гя.т.д = (-я.т + + Ья.пЖя.т + я.д ); я.д ; Ья.т - индуктивность якорных це-пей двигателя и тормозного генератора; Сг - конструктивный коэффициент тормозного генератора; is, Rb, Тв - ток, сопротивление и постоянная времени обмотки возбуждения тормозного генератора. Соответствующая этим уравнениям структурная схема силовой части привода показана на рис. 6.3. Из нее следует, что в общем случае автоматические системы регулирования скорости и момента взаимосвязаны не только через упругую связь, но и через якорные цепи. Линеаризация схемы может быть произведена общеизвестными способами. Дополнительное упрощение линеаризованной схемы может быть получено с учетом того, что незначительное изменение потока тормозного генератора Фт приводит к большому изменению его тока якоря. Благодаря этому можно считать, что основное изменение момента тормозного генератора происходит при изменении его якорного тока, т. е. ДМт = Ст (/я. тоДФт 4- ФтоА1я. т) X СтФтоА1я. т, где /я.то и Фто - соответствующие начальные значения. Переходя к нормированной структурной схеме, выполним нормирование так, чтобы динамические коэффициенты усиления регуляторов в относительных и абсолютных единицах были равны друг другу. Коэффициенты измерителей скорости и момента сделаны равными единице. Введены обозначения: ря.д = /я.б Rя.ц 1Еб = /я.б Яя.д /(Сд«б) (аналогично связаны Ря.п с /?я.п и ря.т с Rя.т), Ря.т.д = Ря.т + Ря.д; 1!я.д(П.дР+1) вклг 1 Т* ((1р.т-1,.аЖ.г.аР+). 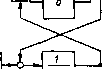 Рис. 6.3. Структурная схема объекта 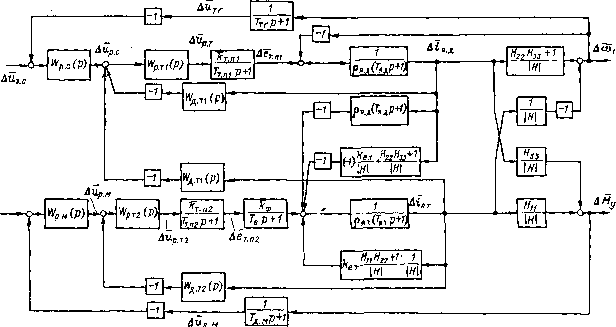 Рис. 6.4. Структурная схема автоматической системы управления электроприводом ИСМТ [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [ 65 ] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0137 |