
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 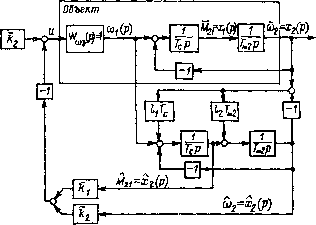 Рис, 3.2. Упрощенная структурная схема аналоговой системы управления скоростью с наблюдателем Даже для такой, сравнительно простой системы, как показанная на рис. 2.23, преобразования и их результаты оказываются достаточно громоздкими. Поэтому для пояснения сказанного и получения обозримого результата в общем виде введем некоторые упрощающие допущения. Пусть у w 1. Тогда, как это следует из изложенного на стр. 98, контур регулирования скорости двигателя может быть замкнут так же, как в жесткой системе. Если при этом частота среза его ЛАЧХ существенно выще частоты упругих колебаний исполнительного органа {л/уТу)~ ЦТТы, то при kc = О объект управления может быть представлен в виде рис. 3.2, где считается, что замкнутый контур скорости двигателя почти безынерционен. Для обеспечения плавного движения ИО вводятся обратные связи по скорости исполнительного органа и упругому моменту, восстанавливаемому наблюдателем. Тогда передаточные функции Wi (р) и Wi (р) могут быть представлены в виде Ц7,(р)=4р( + [(¥.7„2 + *2)/(7-с7„2)1р Щ (р) Wi {p)=Js - Щ (Р) 1 + hp- + 1(Т„2 + 11)1{ТсТш)] Р-* (hk-r hh) + [(hh)ITui - ikkl)lTc] р- И-гр-Ч-ИТ„2 + «/(г,г„а)1 р-» где ki = 1,4(ОоТ,; = ПГ„з4-1; 1 = ТА -Г7; 1 = == 1,4 (Ооя- Значения ©о и ©он по-прежнему характеризуют быстродействие системы и наблюдателя. Переход от непрерывного описания алгоритма управления к дискретному выполняется способом подстановки в tti (р) и W (р) вместо р его дискретной аппроксимации вида Tozl{z-l). В результате, после преобразований, закон управления в дискретной форме можно представить как:- и (г) kp. сЫу (z) -Uo. с (z); «о. с (2) = ai«o. с (2) 2-1 -айо. с (г) z + азЩ (z) ~ - 04©! (z) -f Gsffla (z)-йвЫг (2) 2-1 или в виде системы разностных уравнений: uin+l) = kp,cUy{n+l)-Uo.c(n+ 1); «о, с (« + 1) = OiUo. с (п) - a2«o. с (п - 1) + йзЮ 1 (п + 1) - ~аф1 (п) + ащ (п -г 1)-ааа ("), где fli = (2 + IJoVN; = 1/Л; «3 = [ТоТ„2 + 70 (/2iTm2 + )]/(П7„2Л); 4 = 7о/(ПЛ); fle = 7-, (/А + khVN; N = l + Tok + To (Г„2 + hWcT). Структурная схема системы с наблюдателем и регулятором, реализованными в цифровой форме на основе подстановочного метода, приведена на рис. 3.3. В этом случае алгоритм управления , уже не может быть разделен на отдельные части: наблюдатель и регулятор, поскольку разностные уравнения определены по общим передаточным функциям Wi{p) и (р). Все коэффициенты щ, входящие в описание алгоритма, в неявном виде зависят как "от параметров объекта, так и от коэффициентов наблюдателя - L и регулятора - к. Следовательно, изменение любого из параметров системы требует пересчета всех коэффициентов алгоритма управления. Кроме этого, к недостаткам подстановочных методов следует отнести то, что при проектировании наблюдателя и регулятора не учитываются характеристики ЦАП и звена чистого запаздывания. wJz)
Рис. 3.3. Структурная схема цифровой системы с наблюдателем 8* 115 3.2. Проектирование цифровой системы управления по дискретному векторно-матричиому описанию объекта Рассматривая второй подход к проектированию АСУ ЭП, обратимся к системе, замкнутой по принципам модального управления. Пусть объект управления порядка п со скалярным входным воздействием описывается матричными уравнениями: (3.1) где А - квадратная матрица объекта размером л X л; В - матрица управления п X 1; С - матрица выхода 1 X г; г - число измеряемых переменных. Известно [491, что решением уравнения (3.1) является X (О = Ф (О X (0) + S Ф (-т) Вы (/) dT, о (3.2) где Ф {t) = е* - переходная матрица объекта. При переходе к дискретной аппроксимации непрерывного объекта (рис. 3.4, а) считается, что входной сигнал квантуется с периодом дискретности Г,, а затем преобразуется экстраполятором нулевого порядка. Выполнение этого условия означает, что входной сигнал остается постоянным в течение n-vo такта квантования, т. е. и (/) = и{пТо), при пТа< t {п + 1) Т. Уравнение состояния объекта в этом временном интервале при ненулевых начальных условиях х (лГо) в соответствии с решением (3.2) будет определяться выражением X (О - Ф (/ - лГо) X («Го) -f и (пТо) S Ф (/ -т) BdT. ff) u(z) x(z) Рнс. 3.4. Дискретная аппроксимация непрерывного объекта (а), векторно-матричная структурная схема (б) [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [ 37 ] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0126 |