
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [ 79 ] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] значения легко получается из (7.27) при задании конкретных численных значений параметров объекта с, Jo2- 5. Постоянная времени фильтра т рассчитывается из формулы (7.28), задавая конкретные значения частоты / > 1000 Гц: т-1 > 0,162л-103 с"1; т < 0,01 с. Окончательно с учетом введенных обозначений конкретизируем структуру адаптивно-модального регулятора в соответствии с уравнениями (7.12) - (7.15) в виде: 0)2 My 1(7-1) О
sgn(coi -Ml); li{t)= -т+-д. c/isgn(ffli -coi); bз = y/{acarT,k,. c). (7.42) Ha рис. 7.3 изображена соответствующая (7.42) детализированная структурная схема адаптивно-модального регулятора для упругого двухмассового электромеханического объекта (7.32) с подчиненным регулированием (7.33), (7.34). Эффективность применения АРУО в следящем электроприводе координатно-расточного станка показана ранее на рис. 7.2. В настоящее время начато серийное производство электроприводов для роботов с подобной адаптивной приставкой типа АРУО, разработанной ЛЭТИ совместно с УкрНИИСИП. 7.6. Адаптивное микропроцессорное управление электроприводом В связи с щироким развитием микропроцессорной (МП) техники в ЛЭТИ [14, 17] были рассмотрены возможности перевода приведенных выще адаптивно-модальных алгоритмов управления в дискретную (цифровую) форму. Основой алгоритма является синте- Таблица 7.3
зирОванная методом гиперустойчивости В. М. Попова структура сигнальной самонастройки со стационарным динамическим наблюдателем, которая впервые была использована в цифровой автоматической системе. Основные ограничения при переходе к дискретным алгоритмам: ограниченность разрядной сетки микроЭВМ делает необходимой замену знаковой функции адаптивного алгоритма функцией насыщения с большим коэффициентом усиления в линейной части; использование «идеальных» адаптивных алгоритмов, в которых используется ошибка, определенная для момента времени /г + 1, в то время, как при практической реализации используется ошибка (или ее интерполяция) в момент времени k. Указанные ограничения приводят к некоторому снижению эффективности действия адаптивных алгоритмов в цифровом виде по сравнению с их аналоговыми прототипами. Однако в целом цифровой адаптивный регулятор продемонстрировал хорошую работоспособность и высокие показатели сигнального контура самонастройки. В табл. 7.3 приводятся данные максимальных ошибок и средних квадратических интегральных ошибок 1% в системе регулирования скорости при изменении момента инерции в 2-10 раз (без адаптивного регулятора и с адаптивным регулятором). Отношение приведенного момента инерции к номинальному обозначено в табл. 7.3 буквой N. При использовании адаптивных структур в системах электропривода возможно построение как сигнальных, так и параметрических алгоритмов адаптации. Однако применение сигнальной самонастройки нередко приводит к требованию быстродействия вычислителя, которое превышает быстродействие серийных микропроцессоров, использование которых для построения МП-систем электропривода экономически оправдано. В настоящее время реализация цифрового вычислительного устройства (ЦВУ) осуществляется на различных МП-наборах, среди которых наиболее распространенными являются К1801, К1802, К1804 и К1810. Перспективно также использование однокристальных микроэвм (ОЭВМ) серии К1816, а также цифровых процессоров обработки сигнала типа К1813 и транспьютеров Т212-Т800. 16 Заказ № 398 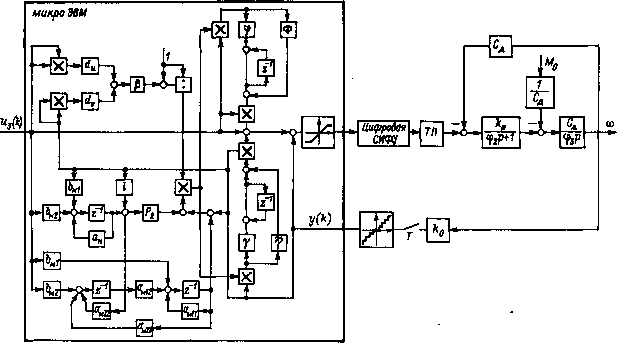 Рис. 7.4. Адаптивно-цифровое управление двигателем постоянного тока от микроЭВМ [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [ 79 ] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0117 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||