
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [ 18 ] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] при принятых допущениях для линеаризоваиной системы могут быть записаны слеллющие уравнения в пр}грашениях: J,p { («1- г) (2.1) где u)j(u)i), 0)2-скорость двигателя и ИО; Л1д, Mgi, Мс - моменты двигателя, в упругой передаче и нагрузки; с - коэффициент жесткости, представляющий собой коэффициент пропорциональности между упругим -юмеитом Мп и углом скручивания передачи; i - передаточное число редуктора; а,, аг - коэффициенты вязкого трепчя; Ь - коэффициент внутреннего трения в упругой передаче; Сд - коэ-ффициеит, связывающий при постоянном потоке возбуждения ЭДС двигателя с угловой скоростью и момент с током якоря /я; Тя.ц и /?я. ц - постоянная времени и со-нротивление якорной цепи; ет. п - среднее значение ЭДС тиристорного преобразователя, от которого питается двигатель: р = didt. Штрихами обозначены величины, не приведенные к валу двигателя. Коэффициент жесткости и коэффициенты трения приводятся к валу двигателя в соотзетств.ии с пыйажешшп: с -- r.i; о2 == 0-2/г; b = bli\ Выбирая базовые значения скорости и моментов на валу двигателя (Об, М(, и на исполнительном органе тг, <1>й/г, Мь Л1бг, а также базовые эч-ччения тока якоря /д. б = Л1б Гд ч ЭДС £б == = Сд(1>6, можно запчсзт}< -<орми1)оз?!Пные уравнепия в виде: Aw, = ДМ,, (Д, - Д(о,)- /?пДЙ,] AAi. - . J- (До,,-- - Suy,): ДЛ1д Ai: (2,2) - д/„ - (Ае,, п - Дол) 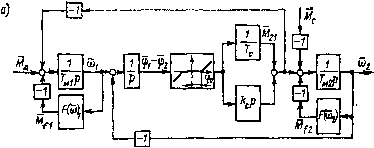 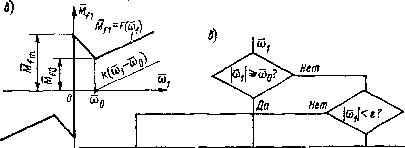 Ряс. 2.2. Нелинейная двухмассовая система-, а - структурная схема; б - зависимость момента трения от скорости; в - алгоритмрасчета нелинейного трения Здесь = УШбШб; Тм2 = 2«б/Мб - механические постоянные времени первой и второй масс; = /Иб/(со)б) = Мб/(с(1)б) - постоянная времени жесткости упругого звена; = ЬшбШб = = Ьыб/Мб - коэффициент внутреннего трения в относительных единицах; кц = йуЫбМс; = «гл-/Иб -коэффициент вязкого трения на массах; Ря.ц = ./?я. ц /я. б/£б - относительное сопротивление якорной цепи. Соответствующая уравнениям (2.2) нормированная детализированная структурная схема (НДС) приведена на рис. 2.1, б, где введены обозначения для приращений моментов трения на двигателе и ИО: AMj = kfiAu)i; AMf = в детализированную структурную схему (рис. 2.1,6) можно легко включить нелинейное звено. На рис. 2.2, а показана двух-массовая система, в которой учтены .нелинейный характер трения на первой и второй массах и зазор между двигателем и упругой передачей. Трение предполагается зависящим от скорости. Если, как это часто бывает, зависимость момента трения (например, на первой массе) имеет вид, представленный на рис. 2.2, б, то описать трение можно алгоритмом, представленным на рис. 2.2, в. Если скорость двигателя меньше некоторого наперед выбранного малого числа е, а УИд-УИ21 меньше УИ,„, то М принимается равным Д1д-Mai, 3 скорость двигателя считается равной нулю. Когда Мд - Мгх превысит Mfm, AJ/i == Mfsgn (Мд - М21), благодаря чему создается избыточный момент и двигатель увеличивает скорость. При 1 ft)il > е момент трения меняется в зависимости от скорости, как показано на рис. 2.2, б. . Если в рассматриваемой системе двигатель связан через упругую передачу с ИО, совершающим поступательное движение, то структурная схема на рис. 2.1, б может быть использована в качестве модели механизма после замены момента в упругой передаче AMgi на усилие AF21. угловой скорости второй массы Да)2 на линейную AV2 и моментов, действующих на вторую массу, на соответствующие усилия. Для оценки влияния упругости на динамику линеаризованной унифицированной системы регулирования скорости с подчиненным токовым контуром целесообразно преобразовать структурную схему на рис. 2.1, б. Имея в виду наличие контура тока якоря и скорости двигателя, преобразования нужно выполнить так, чтобы в преобразованной схеме каждый контур имел свой объект регулирования, в передаточной функции которого отражалось бы влияние упругости. Записывая уравнения (2.2) в матричной форме как х = Ах+ Ви, можно получить матричную передаточную функцию двухмассовон электромеханической системы Wo(p)-(/?I-A)-iB----iibpL.B. (2.3) где I - единичная матрица; adj (pi-А) - присоединенная матрица; F(p) == det (pi-А) - определитель матрицы (р1-А). Вектор состояния объекта и вектор входных воздействий представляют собой X == col 1X1X2X3X4) = col [AJaAo>iAM2iAM2]; u = со1 [Абт.пАУИс]- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [ 18 ] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.011 |