
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] Ofi 0,5 0,6 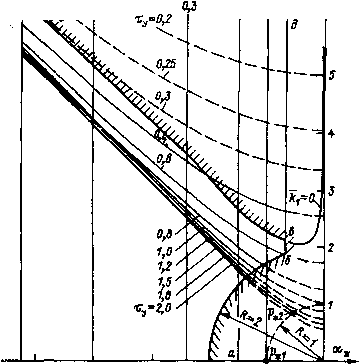 -5 -3 -Z -7 0 Рис. 2.12. Область допустимых соотношении параметров на плоскости корней Выбирая ДЛЯ настройки на оптимум по модулю кр,с = TJ(2Tj3), получим, что полюсы системы распределяются по Баттерворту при соо = а нормированная передаточная функция имеет вид pi + 2р2 + 2я. + 1 Как показывает опыт эксплуатации систем подчиненного регулирования, их чувствительность к изменению tjs является вполне приемлемой на практике. Исходя из этого целесообразно потребовать, чтобы чувствительность рассматриваемой упругой системы к изменению Гэ была не выше, чем в жесткой системе. Сравнительный анализ чувствительности передаточных функций Wza (р) " 3 ip) показывает, что чувствительность системы к изменению х, замкнутой повектору состояния, будет практически такой же, гкак в жесткой системе, если неуправляемый корень р будет располагаться не выше линии вг, являющейся частью линии = О, построенной на основании выражения (2.24) для ki. Это дает основание принять линию 1 = О за верхнюю границу области допустимых соотношений параметров, ограниченной кривой абвг (на рис. 2.12 заштрихована с внешней стороны). Для оценки возможного быстродействия системы и выбора его в зависимости от соотношения постоянной времени упругости Ту и эквивалентной малой постоянной времени Гэ удобно область допустимых соотношений параметров строить в координатных осях т/ту, Ту или, что то же самое, Тэ/Ту, Ту. Кривая абвгО, ограничивающая эту область, показана сплошной линией на рис. 2.13. На основании выражения (2.21) для Wtou (р*) может быть записано выражение переходной характеристики для скорости дви- • гателя: где т = /С0(,; f (т) - переходная характеристика, соответствующая передаточной функции р/{р + 2р + 2р + 1). Кривая f (х) при Тэц = О показана на рис. 2.11. Поскольку к моменту достижения ею максимума приращение (т)/Д(Вуст еще пренебрежимо мало, значение /max характеризует отнесенный к установившемуся приращению бросок скорости двигателя в начале переходного процесса при ступенчатом управляющем воздействии \ Дшуст / = 0,31уту. WycT /max Переходные характеристики to а (т), близкие к соответствующим настройки Баттерворта, могут быть реализованы при условии, что для этого не требуется недопустимо большого значения начального броска скорости двигателя, а следовательно, и тока якоря. В левой части рис, 2.13 сплошной линией показана зависимость %.пред = f (у), соответствующая броску скорости двигателя, равному ее установившемуся приращению (Аа JА(»у„)= 1, что обычно допустимо при использовании двигателей общепромышленного назначения. На основании изложенного рекомендуется следующий порядок расчета системы, обладающей наибольшим возможным быстродействием: 1. По известному значению Т/Ту на основании графика рис. 2.13 определяется значение Ту, при котором характеризующая точка лежит на верхней границе области допустимых соотношений параметров с учетом значения Ту.пред, определенного по у. 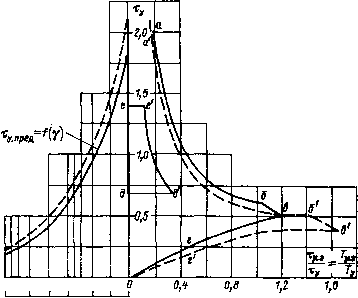 уЮО W 20 10 4 2 1 Рис. 2.13. Номограмма для оаределения возможного быстродействия системы, замкнутой по вектору состояния механизма -- система без введения интеграла; --- - с введением интеграла 2. По выражению Шо = Ту/Гу определяется средний геометрический корень, характеризующий максимально возможное быстродействие системы. 3. Рассчитываются относительные постоянные времени тэ = = Гр,эСОо и т„ = Г„СОо. 4. По формулам (2.24) вычисляются коэффициенты регулятора Ai, ki и Аз. Передаточные функции системы по возмущению, записанные на основании выражения (2.17) с учетом того, что и = кхц, получаются в виде ДМс (р.) (p») ДлТс (р.) =(-1) Тм2= (-1) pijApl+Bpl + Cp+d Я (р.) fpl + Gp, + k Н (Р.) (2.25) где Я (р*) = Я* (р) - характеристический полином, определяемый выражениями (2.22) и (2.23); [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [ 27 ] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0117 |