
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [ 15 ] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] Отсюда С(р1-АГ- Р +• „2 п / J Н(р) = С(р1-А)-1В X ..2 П / J г 2 L JL -(-47)] = р + 1 Первый и второй элемент матрицы представляют собой передаточные функции напряжение - ЭДС и момент сопротивления - ЭДС. Так как в передаточные матрицы Н (р) и G (р) входит выражение (р1-А)~, то все элементы этих матриц, т. е. передаточные функции системы, содержат выражение F(p) = det(pl-A), являющееся характеристиками полиномом системы. Корни этого полинома называются собственными числами матрицы А. Указанные понятия используются в дальнейших разделах книги, в частности, при рассмотрении методики синтеза модального и адаптивного регуляторов с использованием методов пространства состояний. 1.5. Управляемость и наблюдаемость автоматических систем Рассмотренный в предыдущих параграфах подход к исследованию автоматических систем на основе понятия пространства состояний оказался чрезвычайно плодотворным и в настоящее время получает все большее распространение. В рамках этого подхода были не только разработаны эффективные алгоритмы анализа и синтеза систем, ориентированные на использование вычислительных машин, но и впервые получены (Р. Калманом) многие теоретические результаты, касающиеся наиболее общих свойств динамических систем, к числу которых относятся такие важнейшие их свойства, как управляемость и наблюдаемость. Смысл и значение этих понятий наиболее ясно выявляется при рассмотрении вопросов аналитического конструирования и реализации регуляторов, в частности, так называемых модальных регуляторов. Известно, что динамические свойства системы определяются, главным образом, ее полюсами, т. е. корня.ми ее характеристического уравнения, или, что то же са.мое, собственными числами матрицы А. Так, необходимым и достаточны.м условием асимптотической устойчивости линейной системы является нахождение ее полюсов в левой полуплоскости комплексных чисел. От взаимного расположения этих полюсов и зависит характер переходных процессов в системе. Для исходной линейной стационарной системы, описываемой уравнением состояния x:=Ax-fBu, (1.37) желаемое расположение полюсов на комплексной плоскости может быть обеспечено введением так называемой линейной обратной связи по состоянию, уравнение которой можно записать следующим образом: u = v-kx. (1.38) В этом уравнении v - это новое обозначение вектора входных (задающих) воздействий; к - .матрица обратной связи. Если и н V - скаляры, то к является матрицей-строкой, элементы которой представляют собой коэффициенты обратных связей по всем составляющим вектора х. Исходная система, которую теперь назовем объектом, и линейная обратная связь по состоянию образуют замкнутую систему, как это показано на рис. I.I9, а. Уравнение этой системы получается объединением уравнений (1.37) и (1.38): x = Ax-rB(v -kx)=:Ax+Bv- Вкх или окончательно х = (А -Вк)х+Bv, . (1.39) 4 Зак»з Ni 398 49 I Одьет Модальный регулятор 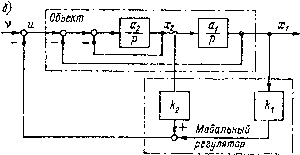 Рис. 1.19. Модальное управление: а - векторно-матричная схема; б - ДСС В ТО время как .динамические свойства объекта в соответствии с урав11еиием (1.37) определяются матрицей А, динамические свойства полученной ;замкнутой системы определяются в силу уравнения (1.39) матрицей А = А-Вк. Задача состоит в том, чтобы найти такую матрицу коэффициентов обратных свя.зей к, при которой замкнутая с помощью обратной связи по состоянию систе.ма и.мела бы желаемое распределение полюсов (предполагается, что такое желаемое распределение известно), т. е. желаемый характеристический полином Яо (р): det {р\-А) = Но(р). С4)ормулированная нами задача называется задачей модального управления, в связи с чем линейная обратная связь по состоянию, представляющая собой ПОсуществу безынерционный регулятор в цепи обратной связи, называется в данном случае модальным регулятором [15, 58]. Вполне понятно, что существование матрицы обратной связи к. придающей системе заданные (любые желаемые) динамические свойства, может быть гарантировано только в том случае, если структура самого объекта не накладывает ограничений на воз.можность управления состоянием объекта х с помощью входного воздействия U. Другими словами, как в этом случае принято говорить, объект должен быть полностью управляем. Дадим последнему термину точное определение, Линейная система, описываемая уравне- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [ 15 ] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0101 |