
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [ 30 ] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] полученные для системы без малых [юстоянных времеаи Интересуясь, в первую очередь, возможностью демпфировании упругих колебаний с помощью автоматизированного электропривода, пренебрежем влиянием диссипативных сил. Структурная схема, построенная на основании рис. 2.7 с учетом этих допущений, приведена на рис. 2.17. Если пр£меняется iipo-порциональный регулятор скорости с W.c (р) -рс, то после введения переменной p, = р/соо. где (0, - среднегеометрический корень (СГК), передаточные функции, характеризующие изменение скорости двигателя и исполнительного вала при управляющем воздействии (без учета показанных штриховыми линиями связей), запишутся в виде: Ally (p.j Асог (Р.) где при соо = [кр.с /(Г„7у)] у (р.) а.рМ- а,Р. (2.28) имеем «1 = 7 Очевидно, что .kp, с J \ Тукр. с / (2.29; (2.30) Единственной величиной, которая может варьироватьс;-! в процессе настройки такой системы, является коэффициеит регулятора скорости. Оценивая врзможность настройки, удобно воспользо-
т.р npUi J--------[=?}*- Рис. 2.17. Упрощенная структурная схема системы управления скоростью и введение в нее дополнительных связей V-ff 0,1 0,3 0,5 0,7 0 1,0 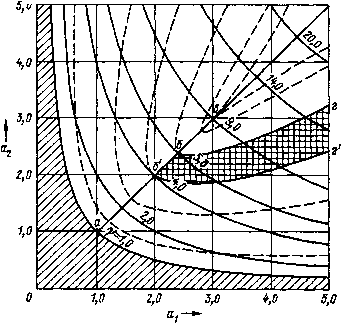 Рис. 2.18. К выбору параметров регулятора скорости и обратныхсвязей ваться известной диаграммой Вышнеградского [10]. При заданных параметрах объекта изменение ftp.c будет приводить к тому, что рабочая точка будет перемещаться по характеристической кривой в виде равнобочной гиперболы, положение которой на диаграмме определяется коэффициентом соотнощения масс у (рис. 2.18), причем увеличение к,. перемещает рабочую точку в область больших значений flj и меньших значений а. При у = 1 характеристическая кривая аа = 1 совпадает с границей колебательной устойчивости. Это указывает на то, что независимо от выбора Аре автоматизированный электропривод не будет демпфировать колебания исполнительного вала, частота которых равна (Vvy)" = 7- а амплитуда тем больше, чем больше Ар.с. Демпфирующая способность автоматизированного электропривода независимо от значения Аре будет оставаться незначительной и при у = 1,1ч-1,2. Однако уже при y > 2,0 - 2,5 существует принципиальная возможность сделать плавным движение исполнительного органа в результате выбора Ар.с. При у < 9 независимо от выбора Ар.е характеристический полином третьего порядка имеет один вещест- венный и два комплексно-сопряженных корня, благодаря чему передаточная функция Цаз (р*) может быть представлена в виде ишаз (р*) = -:г --- - ------------ д «у (р.) (tiP. + 1) (т2р2 + 2Е3Т2Р. + 1) Штриховые линии равного значения %э = const нанесены на диаграмму рис. 2.18. Требуемое значение коэффициента регулятора скорости определяется на основании выражений (2.29) и (2.30) как "у \ Oi / Ту (2.31) С учетом чего Oin=- л/iTy л/Ту (2.32) При данном у наибольшему из возможных значению э соответствует выбор такого значения fep.c, при котором 0 = 02= Vv- Как следует из выражений (2.3i), выполнение этого равенства приводит к необходимости выбирать коэффициент усиления регулятора скорости в соответствии с формулой Йр.с--=Йр.со = Т„/(Туу/). (2.33) Реакция на скачок управляющего воздействия при таком выборе показана на рис. 2.19 при у = 1 ч- 4 сплошными, а при у = 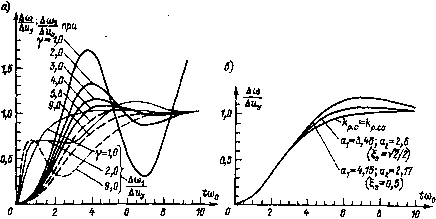 Рис. 2.19. Реакция на скачок управляющего воздействия; а - при выборе *р.с = *р.со и разных значениях у; б - при у = 9 и разных kp,c- [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [ 30 ] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0104 |