
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [ 50 ] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 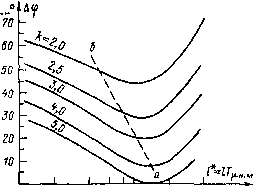 0,1 0,2 0,4 1,0 2,0 4,0 Рис. 4.5. Зависимость запаса по фазе системы моделирования от параметров И При замыкании контура по производной от скорости, если замедление при дифференцировании Характеризуется постоянной, численно равной времени Г. Наличие контура моделирования Tui приводит к отличию передаточной функции Дц»! (р)/Дгя (р) от желаемой, которая должна представлять собой интегрирующее звено l/(T„ip). Вводя нормированную переменную р = Г„. „ р и обозначая т„.р = Гм.р/Тн. м, можно записать эту передаточную функцию в виде: м. р (1 + *) р. Qip.y (4.9) где при принято.м описании токового контура 2р;+2(Г 1- 1)р + (2/* + \-k)p + С Q,(p,) = (l+fe)- 2рЗ + 2 (Г + I) р2 + {21* +\)р -I- /• (1+;) При /* <: {k-1)/2 частотная передаточная функция Q (/«*), где со* Гдн. м », становится неминимально-фазовой, что, как показывают расчеты, приводит к значительно.му искажению зависимости ю = / (гя) при скачке 1я. Это позволяет считать допустимыми значения /*, соответствующие части номограммы рис. 4.5, расположенной правее линии аб, отвечающей равенству /* = {k-\)l2. Модель упругого механизма может быть выполнена как в аналоговой, так и в цифровой форме. На рис. 4.4,6 показана модель двухмассовой системы, в которой механическое демпфирование учтено коэффициентом kc- В соответствии с выражениями (2.2) при пренебрежении трением на массах можно записать передаточную функцию, связывающую при управляющем воздействии упругий момент с током якоря: д7я(Р) ту + к,тр+1 Формально эта функция, получается в результате замыкания единичной отрицательной обратной связью контура с выходной координатой М21 и передаточной функцией прямого канала Wy(p}=---- Т.Г уту + kjp+i При kc = О этот контур находится на границе устойчивости, благодаря чему в объекте существуют незатухающие колебания. При полунатурном моделировании контур упругого момента реализуется с помощью связи по координате иу = модели механизма (рис. 4.4, б), вводимой на вход контура тока нагрузочной машины. Если показанная штриховыми линиями связь с коэффициентом aTfa.JTc отсутствует, то с учетом выражения (4.7) передаточная функция прямого канала контура упругого момента приобретает вид Wy.Ap) = - .f"-Rip). н. м (Р) RiP)= Тм.р 1 + «7/3. н. м (Р) k (1-р + 1-)* Наличие сомножителя R (р), который в предположении о справедливости выражения (4.8) может быть переписан в виде Rip)=.------- , при малых значениях kc приводит к отсутствию запаса по фазе и неустойчивости контура, моделирующего упругий момент. При постоянной времени Ту, хотя бы в четыре-пять раз превышающей значение Гн. м, фазовое искажение, вносимое этим сомножителем, может быть компенсировано введением форсирующего звена aTn.JT, реализующего производную от иу- Варьируя значение а, можно добиваться требуемого значения коэффициента kc. Передаточная функция модели при управляющем воздействии в виде изменения тока якоря двигателя определяется в результате совместного решения (4.7) при Mci = О и второго и третьего уравнений системы (2.2) при АМц = Д«д,у и АМс = О- Рассматривая 154 наиболее тяжелый случай при /г = О и полагая в уравнении (4.7) «ВХ1 «му Н-а У" («1 -«шг) = «му(1 --аГ„. мр), можно получить Awi (р) Ая (Р) Гм. рР[Г/"з.„. „(Р) (-*Р + 1) + Н (v7yP>+ 1)+м2Р(Н-«Гц„.„р)(/-1р+1) (4.10) Полагая, что выполняется равенство (4.8), и вводя нормирование, как это сделано при записи формулы (4.9), можно передаточную функцию представить в виде ДГя(р,) т„.р(1-/)р, tV+I Sip,.), (4.11) где Ту = Ту/7ун. м- Сомножитель 5 (р) определяет отличие передаточной функции модели от желаемой. Вид частотной характеристики S Ца) зависит от Ту, у, k, аи I* (рис. 4.6). Сплошными линиями на рис. 4.6, а показаны ЛАЧХ для k = I при /* = 0,25, штриховыми - при /* = 0,75. Характеристики на рис. 4.6, б построены для /г = 3, причем сплошные линии относятся к случаю /* = 1, а штриховые - к /* = 3. Наличие при у > 1 «провала» характеристики на частоте 1/ту обусловливает демпфирование упругих колебаний при выбранном значении а. Резонансный «всплеск» при /г = 3 является результатом малого запаса по фазе при данном /* в соответствии с рис. 4.5. Если для моделируемой АСУ ЭП зона существенных частот располагается вблизи частоты 1/Ту, то искажение характеристик АСУ ЭП за счет сомножителя S {\(л будет допустимым и установка полунатурного моделирования обеспечит нормальное функционирование испытуемой АСУ ЭП при Ту = 7у/7„. „>(4-5). Сказанное иллюстрируется результатами эксперимента, приведенными на рис. 4.7. Установка полунатурного моделирования включала в себя две одинаковые машины ПБСТ-33 (1 кВт; 5,4 А; 220 В; 1000 об/мин). Тиристорные преобразователи ТП и ТПН ~ типа ПТЗР с согласованным совместным управлением. Наблюдатели и модель упругой системы выполнены на операционных усилителях, регуляторы тока и скорости исследуемой системы - на элементах УБСР. Малые постоянная времени и реальная механическая постоянная времени стали равны Ti = Tа,ы = 0,02 с; [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [ 50 ] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0289 |