
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 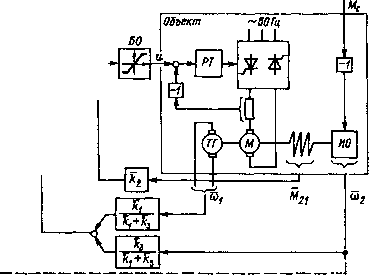 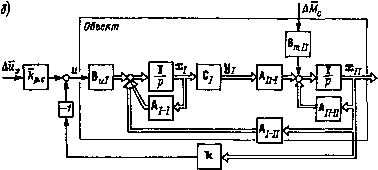 Рис. 2.10. Система управления скоростью, замкнутая по вектору состояния механизма: а - функциональная схема; б - матричная структурная схема собой достаточно сложную динамическую систему. Порядок системы увеличивается, если существует замедление, вносимое датчиками, установка которых предполагается для измерения со, М21 и (Л2- Очевидно, что сколько-нибудь общие выводы о свойствах рассматриваемой АСУ ЭП могут быть получены только при разумном упрощении ее математического описания. В дальнейшем в настоящей главе рассмотрение ведется при следующих допущениях: 1. Система линеаризована, что предполагает, с одной стороны, пренебрежимо малое влияние зазоров и нелинейного трения, а с другой,- такие значения внешних воздействий, при отработке которых якорный ток не превышает предельно допустимого значения и система токоограничения не действует. 2. Сформулированные в § 2.2 условия пренебрежения обратной связью по ЭДС двигателя выполняются, и настроенный на оптимум по модулю токовый контур приближенно описывается передаточной функцией (2.16) где Тцэ == 2Гд/ - эквивалентная малая постоянная времени. 3. Датчики скорости и упругого момента представляют собой пропорциональные звенья, благодаря чему при рассмотрении математического описания системы в относительных единицах можно считать, что связи с коэффициентами fej, feg и feg выполнены непосредственно по «1, Мгхисог. Если же быстродействие датчиков ограничено, то, считая, что оно характеризуется одинаковой постоянной времени Тф, можно принять Тэ = 2Т,-{-Тф. 4. Силы трения не учитываются, т. е. принимается kfi - kf = = ft, = 0. Записывая матричное уравнение объекта в виде х-Ах-ЬВ„«+В„ДМс, (2.17) можно построить матричную структурную схему системы (рис. 2.10, б). Вектор состояния объекта разделен на вектор х, = = col IxiXl, элементами которого являются координаты токового •контура при = Ai„, и вектор состояния механизма хц = = col [XgXiXj] при Хз = Acoj; Х4 = АМ21; Х5 = Acoj. С помощью матрицы Ci из XI выделяется вектор уь в конкретном случае представляющий собой координату Xg = г/ь Тогда
L т 2 1 цэ ; Ai ii = 0; B„i = АМс. (2.18) Аа [ = г 1 п Ci = lO 1]; Ап п mil - Тс О Тш О Статическая система. Если регулятор скорости пропорциональный (показанный на рис. 2.10, а штриховыми линиями канал введения интеграла в закон регулирования отсутствует), система будет иметь статическую ошибку по возмущению. При отсутствии возмущения выбор ftp.с = fei 4-3 обеспечивает равенство установившихся приращений Acoi уст = Асог уст = А"у- В замкнутой системе управление записывается как u=fep. сА«у-кхп, где к = [kikik]. Тогда с учетом введенных в § 2.1 обозначений могут быть записаны передаточные функции, связывающие приращения скоростей Acoj и Асог с приращением управляющего воздействия Аыу: . г„1з (р) = (Р)/Д«у (Р) = {ут\р+т (Р); Гс,2з(р) = А«2(р)/А«у(р) = 1/С(р). Здесь (2.19) Q{p) = ы \1э Н{Р) (2.20) р. с Я(р) = с1е1(р1-А~В„к) = р* + -Р* + ( П ) цэ м цэ у г2 тт цэу н [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [ 25 ] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0125 |