
|
|
|
Главная страница Упругие связи [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [ 64 ] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] б) п ¥4 04 мин Э мин 33 мин 1MUH 30 с Рис. 6.1. Кинематическая схема (а) и циклограмма моментов (б) испытательного стенда механических трансмиссий 1,2,4 - редукторы; 3 - испытуемая трансмиссия включать в себя приводной двигатель М и тормозной генератор Т, соединенные испытуемой трансмиссией. В большинстве случаев используется схема с общим преобразователем ТП1, на зажимы которого включены МиГ (рис. 6.2). Автоматическая система регулирования скорости с подчиненным контуром регулирования тока преобразователя, включающая в себя регуляторы тока РТ1 и скорости PC, воздействует на преобразователь ТП1. Система регулирования момента с измерителем момента ДМ, регулятором РМ и подчиненным контуром тока якоря тормозного генератора (регулятор РТ2) воздействует на поток тормозного генератора через тиристорпый преобразователь ТП2. Программное устройство ПУ задает характер изменения скорости и момента. Из сказанного очевидно, что система управления электроприводом ИСМТ принадлежит к многосвязным автоматическим системам регулирования (МАСР) с естественными перекрестными связями в объекте. Она содержит как минимум две локальные системы регулирования и несколько нелинейностей, таких, как произведения координат, зазоры механической передачи, нелинейности статических характеристик, ограничения выходных координат регуляторов и др. Однако обычно требования к точности исследования динамики таковы, что это исследование может быть произведено на основе линеаризации системы. В этом случае используются аналитические методы анализа, позволяющие получить общие выводы о влиянии 13- 195
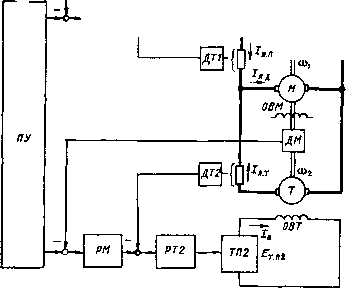 Рис. 6.2. Структура автоматической системы управления электроприводом ИСМТ параметров системы на ее динамические свойства. В сочетании с расчетами на АВМ и ЦВМ, а также с промышленным экспериментом они дают наибольший эффект. В качестве аналитического метода для исследования динамики МАСР целесообразно применять векторно-матричные структурные схемы (15, 61, 72] в сочетании с нормированными детализированными структурными схемами. Достоинства такого подхода определяются компактностью записи уравнений, удобством прослеживания причинно-следственных связей, сравнительной простотой эквивалентирования МАСР и выделения локальных систем. При решении задачи частичного синтеза систем управления ИСМТ структура и часть параметров многосвязного регулятора являются заданными или выбранными из тех или иных инженерных соображений. Требуется найти остальные параметры регуляторов. Для структурной схемы на рис. 2.1, полаГ-ая, что все демпфирование осуществляется в результате рассеяния энергии в испытуе-мой трансмиссии (1 = kf - 0), и обозначая Л{д= Afi - момент двигателя, Мс = Ms - момент тормозного генератора, можно записать в векторной форме: i = H(p)y, где i = col [AMi 0 AMgl; у = col [AtOiAMy Acoj 1; (6.1) Hip): Яц = r„ip; Я22 = TcpliKTcP + 1); Я33 = r„2p- Для выделения локальных систем объект регулирования с перекрестными обратными связями удобно преобразовать в объект с перекрестными прямыми связями. С этой целью уравнение (6.1) умножается слева на матрицу Н" (р). Так как Н (р) - неособенная матрица, то н-Чр)1=н-Чр)Н(р)у. где Н-1 (р) = adj Н (р); Я = det Н (р); Я22Я33+ 1 adjH(p)= -Я33 1 "Яа2Язз+ 1 Язз 1 Таким образом. ЯцЯзз -Яп - Язз ЯцЯзз Я пЯ 22 + 1 . (6.2) y = H-i(p)i. Элементы матрицы H" (р) следующим образом связаны с параметрами двухмассовой системы: \И\ Hi, Y-1 Tdp+l . Y «1(Р) ту + ТаР+\ Wi(p) (6.3) где Wi (р) и W2 (р) определяются формулами (2.10). [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [ 64 ] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] [91] [92] [93] [94] 0.0109 |