
|
|
|
Главная страница Телеобработка данных [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [ 52 ] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] системы, в которых из-за больших отклонений частоты сигнала тактовая частота должна восстанавливаться по пилот-сигналу, практически не применяются. Особенно важно точное регулирование моментов отсчета в системах, в которых используются адаптивные корректоры [29*]. Дело в том, что в таких системах адаптивный корректор обычно обрабатывает только значения отсчетов, т. е, управляется тактовым сигналом (см. разд. 5.3.2). Указанное регулирование имеет важное значение именно при тактовом управлении корректором еще и потому, что синхронизация обычно должна быть восстановлена по сильно искаженному сигналу. Ведь преимущество адаптивного корректора как раз в том и состоит, что для безошибочной передачи при отсутствии помех не требуется наличия хоть сколько-нибудь открытого «глазка» на глазковой диаграмме, как у систем без адаптивной коррекции. В системах с адаптивной коррекцией в боль-итьсгве случаев предусматривается стартовый режим, например, с применением отдельных импульсов, при котором и по сильно искаженному принятому сигналу может быть, по крайней мере грубо, восстановлен такт и грубо отрегулирован корректор. При последующей «точной» регулировке можно коМбинироъать критерии, по которым устанавливаются тактовые интервалы и коэффициенты адаптивного корректора. Возможные различные критерии регулировки ведут при этом к разным реализациям; так, в [4.43] обсуждается регулирование до получения некоторой оптимальной оценки, а в [4.44] - по критерию минимума среднеквад-ратической ошибки. Выбор и практическая реализация системы регулировки зависят в данном случае не только от метода передачи, но еще сильнее от структуры выбранного корректора. Кроме того, если применяется адаптивный корректор, то имеется возможность совсем отказаться от специального регулирования фазы тактов, возложив на него эти функции [4.45]. Точный анализ данного метода, применение которого, в принципе, желательно, должен, однако, производиться с учетом практически ограниченного диапазона регулировки у реальных звеньев корректора и, поскольку это связано с учетом нелинейности, может оказаться осуществимым только на основе моделирования. Практический опыт работы с такими системами до сих пор мало освещен. При рассмотренных выше методах в любом случае должна быть гарантия, что в сигнале данных содержится достаточная для восстановления тактов информация. При передаче в первичной полосе частот это можно всегда обеспечить путем специального кодирования сигнала данных (см. разд. 4.2). Такая возможность, однако, всегда приобретается определенной ценой: например, при двухфазном методе за счет более широкой полосы частот, при методе СВБК-п за счет размножения ошибок. 6-41 161 Часто прибегают к перемешиванию (скремблированию) передаваемых данных с помощью скремблера*, который из произвольной последовательности данных формирует псевдослучайную последовательность [4.46, 9*]. На приеме должно быть выполнено обратное перекодирование с помощью дескремблера. Основной частью скремблера является регистр сдвига с обратной связью, показанный на рис. 4.43. Сигнал данных, т. е. двоич- 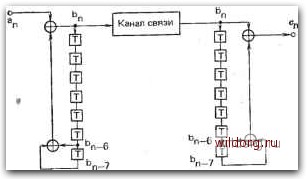 Дескремблер Скрембпер Рис. 4.43. Скремблер и дескремблер ная последовательность а„, с помощью регистра сдвига в соответствии с соотношением Ьп = Ьпе(Ьп б®Ьп-7) - (4.36) (здесь в качестве примера взят семиразрядный регистр) преобразуется в посылаемую двоичную последовательность Ьп. В приемнике из этой последовательности таким же регистром сдвига, входящим в дескремблер, формируется последовательность с„: Cn = br,®{qn-e®bn-,). (4.37) Последовательность с,, на выходе дескремблера идентична первоначальной последовательности а-п- Это легко проверить, преобразовав (4.36) к виду a„ = bne(n 6®bn-7) (4.38) и сравнив его с (4.37). Специальные меры по синхронизации скремблера и дескремблера не требуются, так как после прохождения семи символов оба регистра сдвига имеют одинаковое содержимое. Однако при осо- * В оригинале использован немещшй термин «Verwurfler», а соответствующий английский термин «scrambler» указан лишь для сведения. В советской литературе последних лет утвердился английский вариант этого термина. (Прим. ред.) [25*] бенно неблагоприятных двоичных последовательностях даже после перекодировки данных с помощью регистра сдвига могут обнаруживаться нежелательные двоичные последовательности. Чтобы предотвратить это, в скремблере и дескремблере предусмотрены схемы контроля, которые при определенных условиях вызывают дополнительные переключения в двоичных последовательностях (например, согласно Рекомендациям МККТТ V.27 [4.47] и V.35 [4.42, 4.48]). Как следует из (4.38) и рис. 4.43, при одной единственной ощибке в последовательности Ь„ в данном примере ошибочными получаются также последующие шестой и седьмой символы. При дескремблировании имеет место размножение ошибок, в данном случае с коэффициентом 3. При групповых ошибках, если неверен именно шестой или седьмой символ (для данного примера), этот коэффициент может быть меньше трех. 4.4.2. ВОССТАНОВЛЕНИЕ ЧАСТОТЫ И ФАЗЫ НЕСУЩЕЙ Кроме восстановления тактов многие методы демодуляции сигналов AM и ФМ требуют выработки в приемнике несущего колебания с надлежащей частотой и фазой. Для восстановления частоты может использоваться один или несколько пилот-сигналов, дополнительно передаваемых вместе с сигналом данных, что дает преимущества, прежде всего, при очень чувствительных методах передачи, например при амплитудной модуляции с одной боковой полосой (см. разд. 4.3.1.2). Наиболее благоприятные значения фаз несущей и тактов, напротив, должны всегда восстанавливаться по сигналу данных, так как фаза приближенно передаваемого пилот-сигнала лишь в особых случаях достаточно точно совпадает с оптимальной фазой несущей или тактов. Если из сигнала данных может быть получена достаточная информация об оптимальном значении фазы, то регулировка фазы может одновременно обеспечивать и регулировку частоты. Процесс регулировки тактов именно так часто и нроисходит, поскольку в ходе его обычно должны отрабатываться весьма малые разности частот. Однако при восстановлении несущей можно отказаться от идеальной регулировки частоты лишь в том крайнем случае, когда метод передачи к ней нечувствителен. Это обусловлено тем, что в тракте передачи могут гоявиться дополнительные сдвиги частоты и нередко требуется дополнительная компенсация фазового дрожания (фазового джиттера) (см. разд. 3.2.2.6). Влияния фазы тактов и несущего колебания на восстановление сигнала данных, как правило, нельзя считать независимыми друг от друга, причем их связь в значительной мере определяется методом передачи. Рассмотрим подробнее влияние погрешностей фаз тактов и несущей на качество передачи на примере передачи амп-литудномодулированного сигнала с одной боковой полосой при ис- 6* • 163 [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [ 52 ] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] 0.0138 |