
|
|
|
Главная страница Телеобработка данных [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] демодулируется путем умножения на ортогональное несущее колебание с необходимой фазой: ёдх (О (О cos** (i)f,t + b{t)sm(i)f,tCOS(i)f,t = [а (t) + а {t) COS 2(iio(-\-b{t) sin 2(Но t]l У . ; g{t) = b(t)sin(i)f,t + a{t)cosb)otsmv)at= . " " . ФНЧпрд.) fi(t) -ГТН- Фпрд Фпрм ... , Д1 ФНЧпрМ1 9м <V гтос OPl Г Фнчпрдг /фНЧпрМо 92 (t) Рис. 4.32. Система связи с применением квадратурной амплитудной модуляции: К - кодер; дк - декодер; ФНЧцрд - фильтр нижних частот передатчика;. ФИЧр - фильтр нижних частот приемника; М - модулятор; Д - демодулятор; Фцрд - фильтр передатчика; Фдрм - фильтр приемника; КС - канал связи; ОР - схемы отсчета и регенерации; ГТН - генератор гактового сигнала и несущей; ГТОС - синхронизированный генератор тактового и опорного сигналов После подавления высокочастотных компонент в приемном фильтре низких частот сигналы обоих каналов полностью разделены: gBi{:t)-a{i)\ gB2(t)=b(t). Если, однако, фаза несущего колебания .отклоняется от требуемого значения, то в gsiKt) или ёв2(0 появляются посторонние компоненты сигнала другого канала. Для синхронизации фазы на приеме (см. разд. 4.4.2) либо применяют пилот-сигнал, размещенный в середине полосы частот (в специально созданном для этого провале спектра сигнала), либо из сигнала данных выделяют сигнал ошибки, пропорциональный отклонению фазы. Для систем КАМ с многопозиционными сигналами векторы сигналов могут упорядочиваться различным образом [4.28]. Один из примеров показан на рис. 4.33, а в томе 2, разд. 7.3.2.2, будет рас- смотрен другой пример, касающийся передачи со скоростью 9600 бит/с по некаммутируемым телефонным трактам. Различные системы КАМ отличаются, хотя и незначительно, друг от друга по чувствительности к шомехам. Причина этого заключается в том, что в зависи-мости от положения векторов сигнала расстояния между соседними состояниями, определяющие чувствительность к помехам, различны. Рис. 4.33. Формирование фазы при квадратурной амплитудной модуляции за счет сложения ортогональных сигналов четырехпозиционной 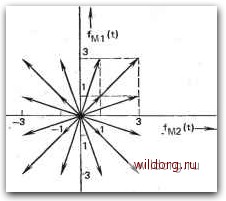 4.3.1.4. УДЕЛЬНАЯ СКОРОСТЬ ПЕРЕДАЧИ ПРИ АМПЛИТУДНОЙ МОДУЛЯЦИИ При всех методах амплитудной модуляции для улучшения ис-кюльзования полосы частот могут применяться многопозиционные сигналы. Кроме того, методы передачи AM сигналов с одной боковой полосой и частично подавленной боковой полосой, а также квадратурная амплитудная модуляция дают возможность и при использовании двоичных сигналов хотя бы приблизиться по удельной скорости передачи к Максимальному значению 2 бит-с-7Гц. . <D С j Несущая частота Несущая частота I Рис. 4.34. Модуль спектра амплитудномодулированного сигнала при удельной скорости передачи b около 2 бит-с-/Гц: а) квадратурная амплитудная модуляция (при использовании импульсов со сглаженным спектром), b несколько ниже 2 бит-с-/Гц; б) амплитудная модуляция с частично подавленной боковой полосой ]f.. при использовании импульсов со сглажен-1 Несущая частота ным спектром, b - несколько ниже 1 2 бит-с-/Гц; в) амплитудная модуляция -с одной боковой полосой при использовании парциально кодированных импульсов Частота- класса 4, 6=2 бит-с-/Гц *М~2Т Для сравнения методов передачи с амплитудной модуляцией на рис. 4.34 приведены спектральные диаграммы для методов, которые допускают передачу двоичными сигналами с удельной скоростью около 2 бит-с-/Гц. Из диаграмм видно, что из этих методов только однополосная передача импульсами по методу парциальных отсчетов позволяет достичь максимального значения удельной скорости передачи 2 бит-с-/Гц. 4.3.2. частотная модуляция Частотная модуляция применяется, прежде всего, для передачи данных с низкими и средними скоростями, так как системы с частотной модуляцией реализуются с меньшими затратами, чем с амплитудной или фазовой модуляцией. Однако в системах с частотной модуляцией повыгпение удельной скорости передачи составляет более сложную проблему. Чтобы показать отличие частотной модуляции от амплитудной, рассмотрим вначале некоторые общие положения. Модулированный сигнал f{t) с амплитудой А и несущей частотой соо описывается выражением /(0 = Лcos[a)o!-f фо + ф(0]- Отсюда мгновенная частота этого модулированного колебания Юм = d [(«о + Фо + Ф (01 fdt = (i)o + d(e {t)/dt. При модуляции первичным сигналом /в (О учетом коэффициента пропорциональности k получаем №м = «>о + А/в(0- Из записанных соотношений следует, что частотномодулирован-ный сигнал описывается выражением /(0 = Лсо8 (i>ot + (eo+kfB{T:)dr (4.23) Из (4.23) ясно, что частотномодулированный сигнал не получается из первичного сигнала путем простого линейного преобразования, как при амплитудной модуляции, а связан с ним нелинейной зависимостью. Поэтому при расчете спектра следует непосредственно рассматривать высокочастотный сигнал. Можно привести расчет спектра для произвольного первичного сигнала fsit). Однако он сложен и не требуется для систем, применяемых при передаче данных. В системах, о которых здесь идет речь, для скачкообразного переключения частоты несущего колебания в модуляторе используется непосредственно сигнал данных [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] 0.0087 |