
|
|
|
Главная страница Телеобработка данных [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] во всей интересующей нас области частот. Источник таких помех предполагается сосредоточенным на входе приемника (рис. 4.47). Плотность вероятности р (л;), значений щума х принимается гаус-совской [4.51, 6*]: р{х)-. аУ2п =- е (4.39) где 0 - дисперсия щума. Из рис. 4.48 видно, что с увеличением дисперсии большие значения x становятся более вероятными, т. е. плотность вероятности распределяется в более широкой области. В пользу этой модели помех, первоначально кажущейся произвольной, говорит, прежде всего, то, что в соответствии ,с центральной предель-.ной теоремой при определенных, не очень ограничивающих допущениях сумма большого числа независимых случайных величин приближенно имеет га-уссовское распределение [4.52, Источник шума Принимаемый сигнал Приемник 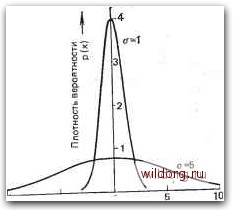 -5 О Значения шума х Рис. 4.47. Модель помехи Рис. 4.48. шума Гауссовское распределение 6*, 31*]. Кроме того, многие шумовые процессы точно описываются принятой моделью, например тепловой и дробовой шумы. Наконец, и опыт показывает, что выбранная модель помех хорошо выявляет различия в помехоустойчивости разных методов передачи. Поэтому указанная модель используется ниже для оценки влияния шумов на передачу. 4.5.1. ВЕРОЯТНОСТЬ ОШИБКИ ПРИ УЧЕТЕ ТОЛЬКО ШУМА В КАНАЛЕ СВЯЗИ Если допустить, что в канале связи совсем нет искажений и помех, ТО на приеме в точках отсчета получаются точные значения передаваемого сигнала. Решение о том, какое из несущих информацию значений имеется налицо, принимается с помощью пороговой схемы. Если на передачу (а практически это всегда так) влияют шумы, то существует некоторая конечная вероятность того, что зна- чение сигнала изменится так, что приемник отождествит его с другим, отличным от посланного, состоянием сигнала, т. е. появится ошибка. Чтобы можно было установить, как велика вероятность такого рода ошибки в практической системе, целесообразно сначала исследовать систему передачи в первичной полосе частот. Если передаются п различных уровней, которые могут принимать значения ± {2i-l)d; i==l, 2, n/2, и появляются одинаково часто, то средняя мощность рт ступенчатой функции времени, с помощью которой передаются данные, определяется выражением [4.53] п/2 . Pm = j;-m-lfd--- d. (4.40) » Чтобы ограничить передаваемую мощность используемой полосой частот канала связи, необходимо ограничить в передатчике бесконечно широкий спектр указанной функции времени. Одновременно желательно ограничение полосы и в приемнике с тем, чтобы сохранить малой мощность шума, пропорциональную полосе пропускания фильтра, установленного на приеме. При последующем анализе системы передачи в первичной полосе частот будем предполагать, что ее общая передаточная.функция имеет вид при со/ < п/Т, при I со I > п/Т, т. е. имеет место прямоугольное ограничение полосы частот. Как уже было отмечено выше, желательно иметь фильтры как на входе, так и на выходе канала связи. Поскольку, однако, общая передаточная функция iF(co) задана, ее разлагают на два сомножителя, один из которых Fs(a) выражает передаточную функцию фильтра передатчика, а другой Fje;(co) - фильтра приемника. При линейных методах передачи и при условии ограниченной мощности на входе канала оптимальным оказывается такое разложение, при котором фильтры передатчика и приемника имеют одинаковые по модулю передаточные функции [4.24]: I (со) I = I /=-£(«) I = IF (со) (4.41) Фазовые характеристики фильтров при этом произвольны, за исключением одного условия - их сумма должна соответствовать передаточной функции требуемой при выбранном методе передачи. При применении нелинейных методов модуляции - ЧМ и ФМ - найти оптимальное разложение не так просто [4.32]. 168 при указанных выше допущениях для идеального канала мощность сигнала в приемнике [4.24] 2л Т J/s(co) ldco. или с учетом (4.40) - • Ps=. (4.42) Если пороговые уровни в приемнике выбраны равными at- - ±2[d; i-0,n/2-1, то ошибка всегда возникает в том случае, когда значение шума в момент отсчета превысит d. Для дисперсии щума на решающем блоке при- i / емника (который соглас- / но поясненному на рис. „ 4.49 алгоритму ставит в Рис. 4.49. Диаграмма, поясняющая правило решения при приеме че-тырехпозициониого сигнала Требуемые значения Пороговые уровни i со Время - соответствие значению сигнала /(/) в момент tn близлежащее разрешенное значение) с учетом ограничения спектра шума входным фильтром приемника, соотношения (4.41) и спектральной плотности шума Ло получаем выражение 2я J F£(co)pdco. С учетом (4.39) вероятность ощибки ре, т. е. вероятность того, что значение шума превышает d, определяется соотношением --(-т)у] (4.43) Разумеется, с конечной, но меньшей вероятностью в случае ошибки может быть превышен и следующий, более высокий порог. Однако при всех реальных .шачениях вероятности ошибки, при кото--рых передача данных еше имеет смысл, вероятность превышения последующего порога на порядок меньше, чем соседнего, и поэтому может не учитываться. [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [ 54 ] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] 0.0088 |