
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] Программирование PLD упрощается при использовании специального граммного обеспечения, доступного и для персональных компьютеров. Эти про"" мы транслируют описание управляющей последовательности из булевых вь ний в данные для программируемого устройства, а также позволяют тестиро запрограммированные микросхемы. стандарт DIN 19239 американские символы 7.2. Принципиальные схемы 7.2.1. Основные элементы На сегодняшний день большинство логических схем построено на полупроводни ковых элементах. Хотя электромеханические реле продолжают применяться их доля постоянно уменьшается, так как они заменяются электронной логикой. Это однако, не означает, что электромеханические реле теряют свое значение, поскольку фактически они остаются незаменимым интерфейсом между управляющей электроникой и исполнительными механизмами. Релейные цепи обычно изображаются в виде монтажных схем (wiring diagrams), на которых показываются источник питания и физическое размещение различных компонентов схемы (выключатели, реле, двигатели и т. д.), а также их соединения. Эти схемы используются техниками при монтаже панелей управления. Широко распространено изображение логических цепей в виде принципиальных схем (рис. 7.15). Принципиальная схема (ladder diagram) - это упрощенный вариант обычной монтажной схемы без явного указания всех электрических связей. На принципиальной схеме каждая ветвь управляющей цепи показана отдельным горизонтальным рядом, "ступенькой лестницы" (английское название происходит от ladder - лестница), и отражает одну конкретную функцию и соответствующую ей последовательность операций. В принятой системе обозначений косвенно подразумевается, что одна вертикачь-ная линия присоединяется к источнику питания, а другая заземлена. питание заземление Рис. 7.15. Структура принципиальной схемы Принципиальные схемы очень популярны при описании комбинационных и " ледовательностных сетей. Они также применяются при программировании Ц 4 вых регуляторов. ..,.,тьноР На принципиальной схеме показываются контакты реле, которые могут оьи мально замкнуты или нормально разомкнуты (нормальным состоянием счита,, то, при котором в катушке не течет ток). Выходное реле (катушка) может обозна более сложную цепь или триггер. Символы для контактов и исполнительного . ройства (реле) показаны на рис. 7.16. Рис. 7.16. Символы, используемые на принципиальных схемах: а - нормально разомкнутого контакта, б - нормально замкнутого контакта и в - катушки реле Пример 7.2 Комбинационная цепь Комбинационную цепь из рис. 7.11 можно представить в виде принципиальной схемы (рис. 7.17). Последовательное включение ключей представляет логическое AND, а параллельное - логическое OR. И, 12 обозначают входные контакты, а 02, ОЗ и 04 - обмотки выходных реле. Все входные условия, т. е. срабатывание этих ключей, должны выполняться одновременно. нормально нормально разомкнутый замкнутый контакт контакт 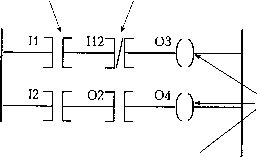 выходы . реле ТЛТ. Комбинационная цепь из рис. 7.11 в виде принципиальной схемы "Чри"" контакты ключей обычно имеют пренебрежимо малое сопротивление и, йле быть кнопочными или концевыми выключателями либо датчиками "Фу*" ™и температуры. Выходным элементом может быть любая резистивная %Й "пример катушка реле, лампочка, электродвигатель или любое другое ус-ство, которое приводится в действие электричеством. Каждая горизонталь принципиальной схемы должна содержать по крайней мере один выходной эл в противном случае источник напряжения будет накоротко замкнут на землю Пример 7.3 Триггер Триггер (рис. 7.13) также можно описать с помощью принципиальной схе мы (рис. 7.18). Когда подан установочный сигнал, ключ S проводит ток, кото рый поступает в катущку реле Y; сигнал на вход R пока не подается. При подаче питания на катущку контакт Y во второй линии замыкается. Даже если ключ S сброщен, то ток продолжает течь по катущке Y через контакт У и триггер остается в состоянии S. Контакт У действует как "память" триггера. При нажатии на ключ сброса R цепь катушки У разрывается и триггер возвращается в состояние "сброс". В промышленности такие реле называются двухпози-ционными, самоудерживающимися либо защелкой. 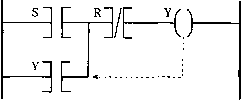 Рис. 7.18. Триггер типа SR в виде принципиальной схемы (самоудерживающееся реле) 7.2.2. Последовательностные цепи Последовательностные системы (sequencing system), т. е. системы управления порядком операций, уже были описаны в разделе 3.7. В таких системах выход зависит не только от текущих значений на входе (как в комбинационных сетях), но и от предыдущих входных сигналов и состояний системы. Соответствующее графичес кое представление должно, следовательно, включать операции записи и обозна ние состояний в различные моменты времени. Многие последовательности оп V ций можно описать, например, с помощью принципиальных схем и опреде некоторым числом состояний, где каждое состояние будет связано с конкрет управляющим воздействием. На принципиальной схеме можно представить различные состояния или шаП в каждый момент времени схема находится только в одном из них. Следоватедь необходим некоторый исполнительный управляющий сигнал для перехода от оД состояния к другому. Этот управляющий сигнал подается при удовлетворении с ветствующего условия (естественно, это условие может быть сложной комбинаи управляющих сигналов). Он действует как сигнал сброса для одного шага и как< няп л7гтяновки лля следующего (ср. рис. 7.18). То есть процесс последовательност нал установки для следующего (ср. рис. /ли). i о есть процесс последовател го управления можно описать как каскад элементов типа SR, где каждый шаГ ветствует горизонтали принципиальной схемы (рис. 7.19). Каждый управляю" переводит следующий триггер в состояние S. Выполнение происходит шаг за ми после последнего возвращается на начало последовательности (Шаг 1). На практике Шаг 1 инициируется с помощью кнопки старта или, в случае зам- той исполнительной последовательности, автоматически после выполнения по-его шага. Когда последний шаг выполнен и условие перехода к первому шагу „ртвооено, подается питание на катушку Шага 1, и самоудерживающееся реле влетворено, ,храня ет ее включенной даже после исчезновения первого условия. Выходной сиг- ная первого шага также подает питание на входные контакты "шаг 1", соединенные следовательно с контактами условия для второго шага. При выполнении этого ус-10ВИЯ реле Шаг 2 замыкает цепь для устройств Шаг 2, и в то же время размыкает цепь для устройств Шаг 1. Последующие шаги выполняются таким же образом. Очевид-до, что для повторяющейся последовательности необходимо последний шаг соединить снова с устройством Шаг 1. Шаг1 условие последний шаг шаг 2 шаг 1 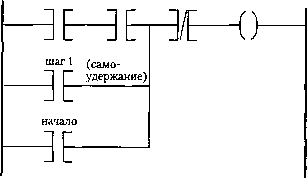 Шагп условие шаг(п-1) шаг(п-1-1) шагп шагп L (самоудержание) • 7.19. Последовательные операции в нотации принципиальной схемы Та Черехо "РДОк смены состояний называется асинхронным (asynchronous). Если *Роннь происходит по сигналам таймера, то это называется син- "ется yOfous) управлением. Таким образом, асинхронная система опреде-•атик управляемая событием, а синхронная - временем. В промышленной авто-ьш асинхронный контроль встречается намного чаще, поскольку операции CW "тва станков и оборудования и, соответственно, изменение их состояния, Чи " от выполнения набора условий, чем от расписания. При проектиро-Управляющих последовательностей необходимо иметь ввиду, что входные Глава?. Комбинационное и последовательностноеупра оаммируемые логические контроллеры сигналы должны сохранять свое логическое состояние в течение всего врем полнения соответствующих операций. Если это не так, то необходимо позабот об их буферизации. а 7.3. Программируемые логические контроллеры 7.3.1. Назначение и функции Программируемые логические контроллеры (UJIK, programmable logic control PLC) - это специальные микрокомпьютеры, предназначенные для выполнения on ций переключения в промышленных условиях. Это название в действительности не верно, так как ПЛК сегодня могут гораздо больше, чем просто выполнять логически операции. Однако эта аббревиатура сохранена, чтобы избежать путаницы с более об щими терминами "программируемые контроллеры" и "персональные компьютеры" (оба по-английски "PC"). ПЛК генерирует выходные сигналы "включить/выключить" для управления исполнительными механизмами - электродвигателями, клапанами лампочками и т. п., которые являются неотъемлемой частью систем автоматизации во всех отраслях промышленности. Основные операции ПЛК соответствуют комбинационному управлению логическими схемами. Кроме того, современные ПЛК могут выполнять другие операции, например функции счетчика и интервального таймера, обрабатывать задержку сигналов и т. д. Основное преимущество ПЛК заключается в том, что одиночная компактная схема может заменить сотни реле. Другое преимущество - функции ПЛК реализуются программно, а не аппаратно, поэтому его поведение можно изменить с минимальными усилиями. С другой стороны, ПЛК могут быть медленнее, чем релейная аппаратная логика. Оптимальное решение для каждого конкретного приложения можно получить, применяя обе технологии в одной системе так, чтобы использовать преимущества каждой из них. Первый ПЛК был разработан в 1968 году группой инженеров компании General Motors. В соответствии с первоначальной спецификацией устройство должно быть несложным в программировании, модификация программы не должна требовать изменения аппаратной части, размеры должны быть меньше, чем у релейных и полу проводниковых аналогов, и, наконец, обслуживание и ремонт должны быть макси мально просты. Дополнительно новое устройство должно было быть конкурентоспо собным по издержкам эксплуатации. Эти требования следует рассматривать в све того, что в конце 1960-х - начале 1970-х годов еще не было малогабаритных прог? мируемых устройств (микропроцессор был изобретен в 1971 году.). Исходные тре вания вызвали значительный интерес у инженеров с точки зрения применения в промышленном управлении. ПЛК на основе микропроцессора был впервые соз б США в 1977 году компанией Allan-Bradley Corporation. Он содержал микропр цессор Intel 8080 и дополнительные схемы, позволяющие с высокой скоростью пр изводить логические битовые операции. Первые ПЛК были сконструированы только для простых последовательное нительные функции счетчиков и таймеров. Более сложные ПЛК обрабатывают °"°оговые сигналы, производят математические операции и даже содержат контуры ения обратной связи, как ПИД-регуляторы, описанные в главе 6. УРдструктивно ПЛК обычно приспособлены для работы в типовых : ; промышлен- условиях, с учетом уровней сигналов, термо- и влагостойкости, ненадежности "хочников питания, механических ударов и вибраций. ПЛК также содержат специ-"«ные интерфейсы для согласования и предварительной обработки различных типов и уровней сигналов. Функции ПЛК все чаще применяются в устройствах ввода/ вывода, входящих в состав больших интегрированных систем управления (раздел 9 6). Типичный серийный ПЛК показан на рис. 7.20. -i 13 Л >. тШ" •iiiimMi!........iiiiiiiiiiiiiii iiiilliiikl iiiiii AAlfa Laval liiimPEicin ..m.c  * к 1* m * * л г.. .< . * St SatiCoROS-Shmane aiiiiiaiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiiii Рис. 7.20. Пример компактного ПЛК для промышленного применения. Кабели ввода/ вьшода присоединяются непосредственно к устройству (с разрешения Alfa Laval Automation, Швеция) Pono можно программировать различными способами - с помощью ассембле-Рям команд, проблемно-ориентированных языков высокого уровня или Кци описанием операций последовательностного управления с помощью фун-Цио™ (раздел 7.4). В Европе наиболее популярно использование фуп-нальных блоков с графическими символами логических элементов, а в США " Сих - тнЫ> рам :М0- % достаточно широко распространены принципиальные схемы. Однако Рам метода постепенно заменяются BASIC-подобными языками про- бирования. делей ПЛК, гсоторые различаются не только размером памяти и числом каналов операций с двоичными сигналами. Сегодня нарынке существуют сотни различных На рис. 7.21 показана основная структура программируемого логического кон- liyif входные сигналы считываются в регистр буферной памяти. Эта Кция всегда включается в системное программное обеспечение ПЛК и не требу-"вного программирования пользователем. Входной регистр может состоять и из вывода (от нескольких десятков до нескольких сотен), но и выполняемыми функ"** ми. Небольшие ПЛК предназначены в основном для замены реле и имеют некотОр [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [ 46 ] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0115 |
||||||||