
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [ 40 ] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] ется на вход REF, а измеренное значение выходной величины процесса - на r обратной связи FB, Предельные значения управляющего сигнала помечены парак рами Hl(gh) и LO(w). Значения параметров настройки регулятора К, и Г(коэа фициент усиления, постоянные времени интегрирования и дифференцировани показаны ниже его символа. Аналоговая выходная схема описывается ее нoмepo, нала и рабочим диапазоном. В дополнение к функциям последовательного управления многие программные пакеты для промышленных приложений включают в себя блоки регуляторов. Зако ченные блоки для решения стандартных задач включаются в библиотеки программ либо в виде готовых к исполнению (возможно, после редактирования связей) под программ, либо в виде включаемого исходного кода, который пользователь может при необходимости модифицировать. Пользователь, кроме того, может разработать собственные блоки, реализующие специальные алгоритмы. Некоторые из подобных программных пакетов обеспечивают большую гибкость, чем непосредственно ПИД-регуляторы. Это позволяет создавать достаточно сложные программные структуры при относительно малых затратах. 6.6. Управляющие структуры, основанные на ПИД-регуляторах 6.6.1. Каскадное управление Ограниченность обычного регулирования на базе обратной связи заключается в том, что коррекция возмущений начинается только тогда, когда выходная величина регулируемого процесса отклоняется от опорного значения. Как обсуждалось в разделе 6.3, упреждающее управление существенно улучшает регулирование процессов с большими постоянными времени или временными задержками. Однако упреждающее управление требует, чтобы возмущения измерялись явным образом, а для расчета их влияния использовалась точная модель процесса. В предыдущем ана.лизе опорное значение всегда указывалось явно. Это значе ние может быть либо введено оператором с клавиатуры, либо считано из внутренней памяти компьютера, либо введено в систему иным способом. Например, выход одн" го из регуляторов может являться опорным значением для другого; такая схема зывается каскадным регулированием (cascade control). Используя две точки измерений одной и той же величины и дополнительный Рр,, тор с обратной связью, можно существенно улучшить динамику реакции проЦесеа изменении нагрузки. Второй датчик размещается таким образом, чтобы он фикс ]> воздействие на процесс прежде, чем оно скажется на выходной величине; при эт необходимости измерять сами возмущения. Это и составляет суть каскадного V. рования. Оно особенно полезно, если возмущенное состояние относится к опорно,, менной или если исполнительный механизм является нелинейным, например или двигатель с нелинейными электродинамическими характеристиками. Примере.6 Управление электроприводом сматР Система управления положением и скоростью электропривода рассл валась в разделе 4.7.2. Каскадная структура (рис. 4.32) в этом случае пред 0ег собой стандартное решение. В принципе, скоростью можно управлять - помощью одного регулятора в стандартной конфигурации с обратной связью Такое устройство должно измерять скорость, вычислять ее отклонение от опорного значения и затем вырабатывать необходимое напряжение для корректировки скорости двигателя. Однако в этом случае регулятор должен учитывать большое количество факторов, и поэтому он окажется сложным и неудобным в эксплуатации. Каскадная структура для решения этой задачи управления приведена на рис. 6.17. Регулятор скорости GJ вычисляет соответствующий моменту выходной сигнал, который требуется для разгона двигателя до заданной скорости. Ток ! , необходимый для создания этого момента, вычисляется из математической модели двигателя. Эта модель представлена здесь просто коэффициентом усиления Кр, что достаточно для двигателей постоянного тока. опорное штение трости
опорное значение тока модель "ток-момент" управление ref током силовая электроника двигатель ток ротора угловая скорость 6.17. Блок-схема каскадного управления угловой скоростью в системе электропривода Внутренний контур регулирования управляет током, необходимым для со-•ания момента. Выход регулятора Gp2 представляет собой управляющий сиг-"- для элементов силовой электроники, обеспечивающих необходимое на-Ря*ение питания двигателя. Вычислим передаточную функцию от опорного значения тока L,f к текуще-"ку ротора / Силовая электроника и электрическая схема двигателя пред-лены соответственно передаточными функциями Сд и Gi (реальная систе-"елинейна однако эти более простые функции достаточны для качественной ""острации принципа). Передаточная функция внутреннего контура Глава 6. Структуры Управп муШ применения ПИД-регуляторов I{s) Gp2 GaG 1 + Gp2 Ga Gm\ Если усиление Gp2 велико, то передаточная функция Gj стремится к едини це и практически не зависит от изменений передаточных функций силовой электроники и электрической части двигателя. Нелинейное поведение двига теля и.ли элементов силовой электроники можно моделировать, например пе редаточными функциями с переменными коэффициентами. К выходу регулятора скорости подключены последовательно три достаточно простые подсистемы - линейный усилитель с коэффициентом усиления Кр, контур управления током Gj (Gj близко к единице) и механическая часть двигателя Сд2- Каскадная структура устраняет многие сложности, присущие силовой электронике и динамике двигателя. Помимо этого, обратная связь, управляющая током ротора, обеспечивает еще одну функцию: поскольку ток ротора должен быть ограниченным, внутренний контур решает и эту задачу. Каскадная структура удобна и для первоначального пуска системы управлениг Сначала настраивается внутренний контур. Поскольку этот контур упрощает динамя ку работы внешнего контура, то настройку последнего произвести легче. При настройке внешнего контура не требуется изменять параметры внутреннего контура. В некоторых случаях, например при управлении положением оси двигателя, добавляютеш( один контур, внешний по отношению к контуру управления скоростью (рис. 4.32). Настройка этого контура позиционирования производится таким же образом. Отметим две особенности каскадной структуры. • Выходной сигнал первичного (главного) регулятора используется в качес» опорного для вторичного (вспомогательного) регулятора. • Два контура обратной связи вложены друг в друга; вторичный контур pacnoi-жен внутри первичного. Динамика вторичного контура должна быть значите.»" выше, чем динамика первичного. В каскадных системах управления особого внимания требует эффект насыш* Чтобы предотвратить насыщение во вторичном контуре, можно использовать ритм, показанный в разделе 6.5.4. Однако, для предотвращения насыщения в п ном контуре необходимо определить момент насыщения вторичного регУ-°Рд„;. которых системах при насыщении вторичного регулятора первичный пер , в ручной режим. Поскольку оба контура имеют различные скорости, они м пользовать разную частоту выборки, причем для вторичного регулятора быть значительно выше, чем для первичного. Программа для первичного Ррс будет обновлять опорное значение для вторичного регулятора. Первичный к<5 лирования может получать опорное значение от оператора или от другой пр 6.6.2. Селективное управление Во многих задачах управления процессами число измеряемых или ъЫ личин превосходит число управляющих переменных. Это не позволяет оД но исключить ошибки во всех управляемых величинах при произвольны av ппопных значений или возмущениях, используя лишь простейшие Р входом и одним выходом. При селективном управлении {selective control) большее число регуляторов управляют общим исполнительным механизмом ДВ ве измерительной информации, которая формируется по результатам изме-f переменной процесса несколькими датчиками. Селектор {selector) выбирает Р"* g подходящее из нескольких измерений. Селекторы представляют собой не-"ейные элементы, расширяющие функции контуров регулирования, которые про-" еалйзовать в цифровых системах. Применение селекторов не только улучшает *6отУ системы, но и защищает ее от опасных режимов. Один из типов селекторных устройств использует в качестве выхода наибольший 1И наименьший из двух или более входных сигналов (на схемах оборудования се--leKTop максимального значения обозначается HS, а селектор минимального значения - 1-S)- Такой тип селектора, например, можно использовать для выбора максимального из нескольких измеренных значений температуры в качестве входа регулятора или порога срабатывания в системе аварийной сигнализации. Другой тип селектора определяет среднее нескольких входных сигналов. Это позволяет измерять температуру на основе показаний не одного, а группы датчиков, что повышает качество и надежность измерений. Примером селективного управления может служить система централизованного теплоснабжения. Задача управления - регулировать скорость питательных насосов таким образом, чтобы давление в тепловой сети всегда находилось выше определенного минимального значения. В качестве выходной величины для управления в произвольный момент времени выбирается точка с наименьшим значением давления. Поскольку положение этой точки меняется со временем и зависит от режима работы, соответствующие сигналы собираются от различных точек сети. Селектор выбирает датчик давления таким образом, чтобы управление скоростью насоса осуществля-мсь исходя из минимального давления. Использование верхних или нижних пределов для переменных процесса представля-сооои другой тип селективного управления, называемый блокированием {override). гдасигнад достигает одного из этих пределов, нормальная работа регулятора прекра- ся и включаются аварийные процедуры. Механизм "антинасыщения" регуляторов -ставляет собой в определенном смысле частный случай блокирования. Границы применения ПИД-регуляторов Мыщл°Р """ применяются для решения многих задач управления •анас"™" процессами. Основная причина их широкого распространения Довле динамические свойства большинства технических процессов мож-*то °Ртельно аппроксимировать динамическими моделями второго поряд-Чачит ПИД-регулятор не подходит для управления процессами, в кото-- вре, "Уо роль играют следуюшие Аякто7Л1-т- Мы "-""ОРЫ успешно примеь ..„„т управления ана """п процессами. Основная причина их широкого распространения Чййл динамические свойства большинства технических процессов мож-"о Pe-fibHO аппроксимировать динамическими моделями второго поряд- ачи ПИД-регулятор не подходит для уг--------- - вг) "Уо роль играют следующие факторы: J"«bie задержки; tvm, Дьный характер динамики системы (комплексные полюса с малым за- "ко* параметров, как предсказуемые, так и непредсказуемые; \ -ibKo входов и выходов. ичения будут рассмотрены в настоящем разделе. Глава 6. Структуры управ 6.7.1. Временные задержки Временные задержки {time delays), или запаздывания (deadtimes), довольно то наблюдаются в промышленных процессах. Они являются следствием протя) ных систем, различных контуров обратной связи или могут быть связаны со врер нем, требуемым для выполнения анализа продукта и выдачи соответствуют результатов в качестве данных измерений. Во всех этих случаях информация о про цессе поступает к регулятору позже, чем это требуется. Вообще говоря, любая запаз-дывающая информация вызывает проблемы ("опоздавшие правильные данные -ошибочны"). Задержки ограничивают работу систем управления и могут привестр к неустойчивости технического процесса. Для того чтобы снизить риск неустойчивости, усиление при ПИД-управленш! процессами с временными задержками должно поддерживаться на возможно более низком уровне. Поэтому применение ПИД-регуляторов к процессам с задержкой обычно сопровождается замедленной реакцией процесса на управляющее воздействие. Сказанное иллюстрируется следующим примером. Примере.7 Управление системой с временными задержками Система состоит из двух химических смесителей, соединенных последовательно (см. также пример 3.7 и рис. 3.10). Концентрация с вытекающего химического продукта измеряется (переменная у), но процедура измерения требует времени Т. Влияние времени задержки иллюстрируется ПИ-управлением концентрацией (рис. 6.18). npouficc сзадержкой 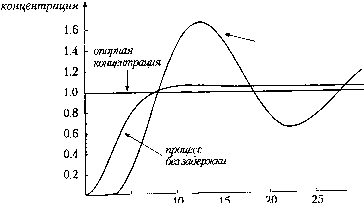 t=3 5 30 врел<я Рис 6.18. Управление химическим процессом с помощью ПИ-регулятора пр" "J-Jg. чии и при отсутствии временного запаздывания (3 единицы времени). Параме у гулятора одинаковы в обоих случаях пи-регулятор был настроен на оптимальное управление при отсутств» временной задержки. Передаточная функция замкнутой системы J рраниЦЫ применения ПИД-регуляторов Gp-Gp-e Y(s) C/,(5) i+Gp-Gp-e где 6;? - передаточнаяункция регулятора, Gp - передаточная функция процесса, а множитель е"* - передаточная функция задержки измерений. Обеспечить управление этой системой с помощью простого регулятора сложно. В приведенном примере в момент времени t = О концентрация является слишком низкой, и регулятор увеличил дозировку для ее повышения. Любые изменения, связанные с действием регулятора при = О, не проявляются до момента = 3. Так как при t<3 регулятор не обнаруживает никаких изменений концентрации, он продолжает увеличивать дозировку. Результат изменения, произведенного при = О, впервые обнаруживается при t = 3. Если усиление регулятора велико, то изменение концентрации за рассматриваемый промежуток времени будет значительным. Соответственно, регулятор снизит дозировку, однако результат этого действия будет обнаружен лишь при t= 6, а действия регулятора между t = 3 и = 6 приведут к дальнейшему ухудшению. Трудности в системе с задержками возникают из-за того, что необходимая информация, поступившая слишком поздно, ведет к нарушению устойчивости. Проблемы управления системами с временными задержками были решены в 1957 году проф. Отто Смитом из Беркли. Он предложил регулятор, включающий модель сис-1е.мы, который получил название экстраполятора Смита (Smithpredictor) (рис. 6.19). регулятор Е модель процесса ~i+e- е-Gp 6.19. Блок-схема регулятора Смита JepeJa™P°f как модель процесса, так и учет временной задерж- Реда -D ..сии как мидель процесса, так и учет временной задерж- Систем функция экстраполятора Gp представляет собой модель техничес- >Если С ""гльно должна совпадать с передаточной функцией процесса Ийые технического процесса, совпадающая с Gp, то непосред- вычисления показывают, что передаточная функция замкнутой системы Y(s) Gp-Gp-e-T [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [35] [36] [37] [38] [39] [ 40 ] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0123 |
||||||||||