
|
|
|
Главная страница Цифровые системы [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [ 35 ] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] Greg регулятор внешнее возмущение технический процесс Рис. 6.2. Структура простейшего регулятора С математической точки зрения передаточная функция Gjg{s) рассматриваем точно так же, как любая передаточная функция процесса G(s). Как уже упоминалос их принципиальное различие в том, что коэффициенты передаточной функции реп лятора Gjq{s) можно изменять (настраивать). Проектировщик системы управления должен подобрать эти параметры так, чтобы замкнутая система - физически процесс и регулятор - работала в соответствии с установленными требованиями Замкнутая система, изображенная на рис. 6.2, имеет передаточную функцию Gcis) = ns) Сигс() G(5) UAs) (6,3) 1 + Gj,Eds) G(s) Очевидно, что чем больше параметров содержит Gj£q(s), тем больше степеней свободы имеет регулятор. Настраивая эти параметры, поведение передаточной функции замкнутой системы можно при желании изменять в достаточно широких пределах. В дальнейшем обсуждается уровень сложности регулятора, необходимый для достижения заданных характеристик. 6.3.2. Упреждающее управление по опорному значению Простейшая система управления, показанная на рис. 6.2, реагирует только на ошибку e(t) и не использует по отдельности два входных сигнала - опорное значе и выходной параметр процесса. Однако ошибка может возникнуть по двум причинам, одна из которых -ние опорного или задающего сигнала u(t), а вторая - изменение нагрузки или кое-либо другое возмущение в системе, вызывающее изменение выходного си y(t). Изменение опорного значения - это известное возмущение. Если регулятор жет использовать соответствующую информацию, то это, вообще говоря, ".jop-улучшить характеристики замкнутой системы - физический процесс и регУ-" В этом смысл упреждающего управления (feedforward control). x Рассмотрим регулятор [уравнение (6.4)], состоящий из двух частей. Контур ной связи Gf{s) представляет собой исходный регулятор, отрабатывающий оШ Так называемый контур упреждения Gjis) контролирует изменения опорного ния и прибавляет к управляющему сигналу поправочный член, с тем чтобы вся сИ реагировала более оперативно на изменения опорного сигнала (рис. 6.3). То ест равляющий процессом сигнал U{s) представляет собой сумму двух сигналов Рис. 6.3. Регулятор, содержащий контур упреждающего управления по опорному значению и контур обратной связи по выходу процесса U(s) = Gpp(s) U(s) + Gpj(s) [U,(s) - Y{s)] Это выражение можно переписать в виде Uis) = [Gpfis) + GpBis)] U,(s) - Gps(s) Y(s)- = Gpis) U,(s) - Gj,(s) Y(s) = Up(s) - UpB(s) (6.4) где - упреждающий сигнал по опорному значению (задающему воздействию), а Upg - сигнал обратной связи. Регулятор имеет два входных сигнала UJs) и Y{s) и, следовательно, может быть описан двумя передаточными функциями Gpfs) и Gp{s) (рис. 6.4). технический процесс 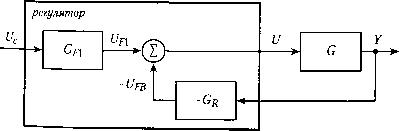 связью "УР линейного регулятора с упреждающим управлением и обратной Посколь "°До%и.°5"°в м простейший регулятор уравнения (6.3), разумно пред- тьку регулятор, соответствующий уравнению (6.4), имеет больше настраи- *Кцио замкнутая система имеет лучшие характеристики. Передаточную полного контура управления можно получить из рис. 6.4 {Gpis) U(s) - Gj(s) Yis)] G(s) - Y(s) ение можно преобразовать следующим образом Y(s) Gp(s) G(s) Gc(s) = ,"°Лож U,(s) 1 + G(s) Gjiis) (6.5) Чятор Q полюсов системы с обратной связью можно изменить с помощью ре-й(-5), а упреждающий регулятор Gp(s) добавляет системе новые нули. От- Глава 6. Структурьрр сюда следует, что вся система может быстро реагировать на изменения опорног нала, если Gp(s) выбрана должным образом. г- 6.3.3. Обобщенный регулятор Благодаря тому что в упреждающем регуляторе опорное значение непреп отслеживается, возможно создание высокоточных (серво) систем управления э роприводами, роботами или станками. Для этих приложений важно, чтобы реак на выходную величину процесса была быстрой и точной при любых изменен опорного значения. Описание регулятора можно обобщить еще больше. Если числитель и знамена тель передаточных функций GJ(s) и Gfi(s) уравнения (6.4) выразить полиномами от s, то описание регулятора можно представить в следующем виде Uis) - Gp,is) (/,(s) - G(s) F(s) = • U(s) - l(s) 2() 5i(5) Y(s) Две части управляющего сигнала показаны на рис. 6.4. Приведя передаточные функции к общему знаменателю, получим Цз) S(s) R(s) R(s) где R(s) = R(s) R2(s), T(s) = T(s) i?2(5), 5(s) = 5(з) R(s). Последнее можно переписать как (6.6) U(s) = ri-"-!+ ... + ?„ Vis) где r,-, 5j и tj - параметры передаточных функций, as - комплексная переменная преобразования Лапласа. Таким образом, регулятор, соответствующий уравнению (6.6), можно предст вить в виде обобщенного регулятора (general controller) R(s) U(s) = T(s) U(s) - S(s) Y(s) Передаточную функцию физического процесса можно явно выразить через числитель и знаменатель (6.7) G(s) = bo-s» + by s"~ + ... + b„ B(s) Ais) Замкнутая система, приведенная на рис. 6.5, соответствует рис. 6.4. Используя выражения (6.6) для регулятора и (6.8) для физического процесса, редаточную функцию замкнутой системы можно записать в следующем виде T(s) 5(s) Y{s) R(s)A(s) T(s)-B(s) (6 G,(s)-----= -- B(s) S(s) A(s) R(s) + B(s) S(s) A(s) Ris) овьюрегуляторы Uc(s)
Рис 6.5. Регулятор, содержащий контур упреждающего управления и контур обратной связи (этот регулятор соответствует рис. 6.4) Передаточная функция замкнутой системы имеет много степеней свободы. Коэффициенты полиномов A(s) и B(s) зависят от процесса и поэтому не могут изменяться. Некоторые из этих коэффициентов бывают неизвестны, а их оценка достаточно сложна. Получение точной модели системы является нетривиальной задачей! С другой стороны, все параметры полиномов R(s), S(s) и T(s) можно подбирать. Коэффициенты T(s) и R{s) относятся к части регулятора, осуществляющей упреждающее управление. Настройка этих параметров определяет реакцию замкнутой системы на изменения опорного значения. Аналогично, коэффициенты полиномов S(s) и R(s) определяют характеристики контура обратной связи. Настраивая S(s) и R(s), можно влиять на реакцию регулятора при изменении нагрузки или любом другом возмущении, вызвавшем изменение выходного сигнала г/(0. Для вычисления параметров регулятора передаточная функция [уравнение (6.8)] обычно сравнивается с некоторой целевой передаточной функцией Gm(s)= y(s) BJs) U,(s) A„(s) Параметры полиномов R(s), S(s) и T(s) можно выбрать при этом таким образом, что BJs) = T(s)B(s) A,(s)=A(s)-R(s) + B(s)-S(s) lecTB" " "- имеют достаточно высокий порядок, т. е. достаточное коли-Hjjg-ggPyeK настройки", передаточную функцию замкнутой системы [уравне-аким °жпо изменять в широких пределах. Порядок регулятора п должен быть ожно* исходного физического процесса. В частности, подбирая R(s) и 5(5), Teopg.lJ"" менять знаменатель передаточной функции замкнутой системы. Место " то означает, что полюса замкнутой системы можно сдвинуть в любое Менец°""""° плоскости. На практике максимальные амплитуда и скорость из-Ра.зде управляющего сигнала ограничивают свободу перемещения полюсов. Khcj* •3-4 бьгпо показано, как полюса влияют на тип переходной характеристи-ByiQ J и позволяют произвольно выбрать ее динамику. В частности, неустойчи-о*н систему, имеющую полюс с положительной вещественной частью, о Стабилизировать с помощью системы управления. Глава 6. Структуры Пример 6.1 Управление положением вертикального стержня Стержень, установленный вертикально на опоре, в реальных условиях может находиться в таком положении сам по себе и упадет, если не предприн мать некоторые меры для его поддержки; такой стержень представляет собо" неустойчивую систему. Если нижний конец стержня непрерывно перемещать в горизонтальной плоскости так, что стержень сохраняет вертикальное пото жение, то система становится устойчивой. На языке теории управления это означает, что стержень имеет полюс с положительной вещественной частью. Pg. гулятор (человек или автомат) имеет динамику S(s) R(s) такую, что все полюса полной системы (стержень и регулятор) имеют отрицательные вещественные части. В разделе 3.3.4 также описано влияние нулей на относительную величину отдель ных членов переходной характеристики. Хотя изменить расположение нулей нельзг их можно сокращать, вставляя полюс в то же самое место, а также вводить новые тж Нули числителя в уравнении (6.9) совпадают с нулями полиномов T(s) и j5(s).Ht вые нули можно добавить с помощью полинома T(s). Однако нули B(s) фиксирован; и переместить их нельзя. Лишь в случае размещения полюса на том же месте нол; сокращается. Однако такие действия требуют осторожности. Например, если нол; полинома B(s) размещен в правой полуплоскости - такая система называется нами-нимально-фазовой (non-minimum phase system), - то и сокращающий его полюс ,io жен быть помещен также в правую полуплоскость. Это приводит к неустойчивое системы, но точный выбор нуля исключает неустойчивую составляющую движен11 Однако если сокращение производится неточно, как это обычно бывает, то замкь; тая система окажется неустойчивой, т. е. не каждая математически корректная рация приводит на практике к желаемому результату. Иными словами, если ф ческая система имеет ноль в правой полуплоскости, то это отражает cboi системы, которое нельзя устранить с помощью регулятора. Однако влияние свойства можно уменьшить соответствующим выбором структуры управления Неминимально-фазовые системы характеризуются поведением, которое в тором смысле противоречит ожидаемому, обычно из-за определенного запазды ответа. Пример неминимально-фазовой системы можно заимствовать из экoнo На рис. 6.6 показана кривая прибыли от продукта в течение его жизненного На ранней стадии, до начала продаж, капитальные вложения и стоимость про вания приводят к отрицательной прибыли (издержкам). По прошествии некот времени - будем надеяться - продукт начинает приносить прибыль. Это лежит в природе вещей и не может быть изменено. Однако руководитель, е будет действовать как очень простой регулятор, оценив текущее значение пР"р,г может принять решение об остановке работ в самом начале, поскольку прибыль . цательна. Из этого примера видно, насколько важно предвидеть будущий усп „ni дукта для продолжения работы. Регулятору, управляющему неминимально- рговыерегуляторы opi, требуется такое же свойство, поскольку он должен каким-либо о едсказывать будущее поведение системы и действовать соответственно. 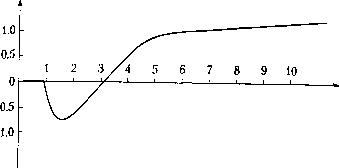 время рис. 6.6. Прибыль в течение жизненного цикла продукта. Вначале затраты на npi тирование и капитальные вложения приводят к издержкам. Любое управляющее; действие, предпринятое на основе оценки мгновенных значений без учета хода i кривой, будет ошибочным Полиномы R(s), S{s) и T(s) нельзя выбрать произвольно. Все передаточные ции регу.пятора (рис. 6.5) должны быть реализуемы физически. Это означает, ч пень знаменателя должна быть выше степени числителя, т. е. порядок R(s) долж( восходить порядок как S(s), так и T(s), в противном случае реальный регулятор с невозможно. Сам физический процесс должен быть управляемым (раздел 3.5.1 ] означает, что A(s) и B(s) не могут иметь общих множителей. Существуют также другие ограничения, связанные с тем, насколько можно "ить параметры регулятора. Если "ручки настройки" крутить слишком интеш например многократно уменьшая время реакции процесса, то управляющие си огут войти в зону насыщения и система перестанет быть линейной. Иными < ли, из-за ограниченности амплитуды сигналов реакцию замкнутой системы г изменить произвольным образом. •4. Упреждающее управление по изменению нагрузки и возмущению в при" возмущения, действующие на процесс, известны и их можно измерн выхо а ожно провести коррекцию управления до того, как они повлия %авл°" "Рметр процесса. Этот подход, который называется упрежда* "°вь1сц""* возмущению (feedforward from process disturbances), может за) ть качество управления. Ниже его иллюстрируют несколько примеров. ировка температуры в помещении Измере управления температурой в зданиях включают в себя датчик д 0 рар наружной температуры. Когда наружная температура изменяет ссматривается как "возмущение"), управляющий сигнал на клапан р [0] [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26] [27] [28] [29] [30] [31] [32] [33] [34] [ 35 ] [36] [37] [38] [39] [40] [41] [42] [43] [44] [45] [46] [47] [48] [49] [50] [51] [52] [53] [54] [55] [56] [57] [58] [59] [60] [61] [62] [63] [64] [65] [66] [67] [68] [69] [70] [71] [72] [73] [74] [75] [76] [77] [78] [79] [80] [81] [82] [83] [84] [85] [86] [87] [88] [89] [90] 0.0087 |
||||||||||||||||||||||||||||||||||||||||||||||||||||